 eric
ericSo last time I checked in I was just finishing up the noggin schematic, or so I thought. In the time since Dan has given myself and some of the other residents at the Design Lab an in depth presentation on the Uno schematic. There were two things that were immediately obvious to me after that:
- I need a separate voltage regulator for the servo motors. The servo motors draw a lot of current and in junction with the demands of the microcontroller and the rest of the circuit it's just to much current being drawn from one regulator. I have changed the schematic to immediately branch off into two separate voltage regulators. One for the internal circuit, and another to power the servo motors.
- The ATMEGA16U2 needs to go. There are less complicated options for the USB to serial chip, such as the FT231xS that the Sparkfun Redboard uses. There are two big reasons for the change, one being the cost of the 16U2, and the other being the large current it draws from the circuit.
Lastly there is the reset circuit;
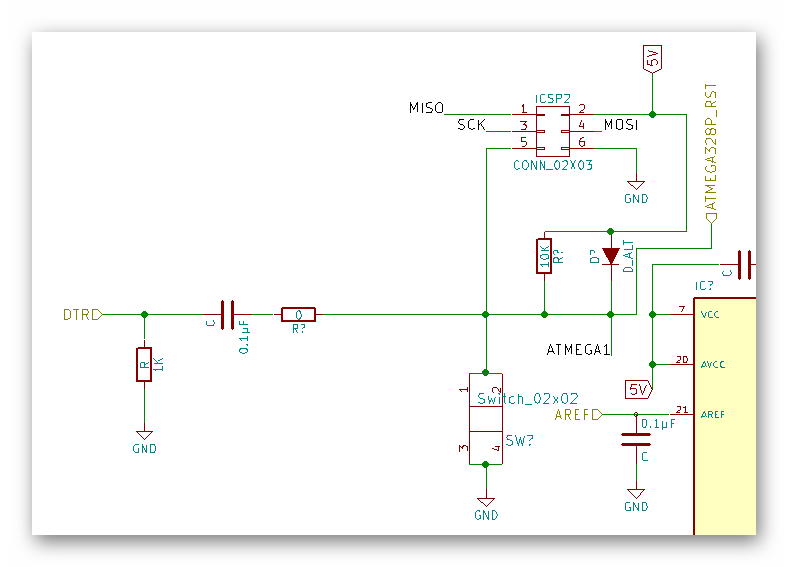
So I am considering what Dan has suggested I do with this circuit and replace it with a reset/supervising IC. I bring this reset circuit up because for the first time in this project I am considering manufacturing concerns in my design. It may turn out that this current circuit is cheaper to manufacture than a circuit that makes use of the fore mentioned IC's, especially when considering house parts. So I need to do some research into the cost of each option.
Till next time
-Eric
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.