 Tom Meehan
Tom MeehanTesting Harbour Freight non-contact IR temp sensor. Drawing from DIY Thermal Camera for information on connecting to Arduino for sending serial information to laptop.
I adapted and simplified some code to read and send the temperature data:
/*Harbour Freight Non-Contact IR Temp Sensor
adapted from https://dorkbotpdx.org/blog/scott_d/inexpensive_ir_based_temperature_sensor_for_microprocessors
changed to use serial monitor instead of a 16x2 LCD and function order re-organized
setup -> loop -> readBit with indentations added to make reading easier
*/
#define CLK 3
#define DATA 4
volatile int nbits = 0;
volatile byte hexbyte = 0;
volatile byte read_byte;
volatile int byte_ready = 0;
volatile unsigned char message[4];
volatile int nbytes = 0;
volatile int message_waiting = 0;
unsigned long last_time = 0;
float temp;
float ambient;
void setup() {
delay(2000);
Serial.begin(9600);
pinMode(CLK, INPUT);
pinMode(DATA, INPUT);
attachInterrupt(1, readBit, FALLING);
}
void loop() {
if (message_waiting == 1) {
last_time = millis();
if (message[0] == 0x4c) {
int t = message[1]<<8 | message[2];
temp = t/16.0 -273.15;
Serial.print(millis()/1000.0);Serial.print(" ");
Serial.println(temp);
}
else if (message[0] == 0x66) {
int t = message[1]<<8 | message[2];
ambient = t/16.0 -273.15;
}
message_waiting = 0;
}
if (millis() - last_time > 1000) {
nbits = 0;
nbytes = 0;
hexbyte = 0;
message_waiting = 0;
byte_ready = 0;
last_time = millis();
}
}
void readBit() {
int val = digitalRead(DATA);
nbits++;
int bit = (val == HIGH) ? 1 : 0;
hexbyte = (hexbyte << 1) | bit;
if (nbits == 8) {
if (byte_ready == 0) {
read_byte = hexbyte;
byte_ready = 1;
}
if (hexbyte == 0xd) {
nbytes = 0;
message_waiting = 1;
}
else if (message_waiting == 0) {
if (nbytes < 4) {
message[nbytes] = hexbyte;
}
nbytes++;
}
hexbyte = 0;
nbits = 0;
}
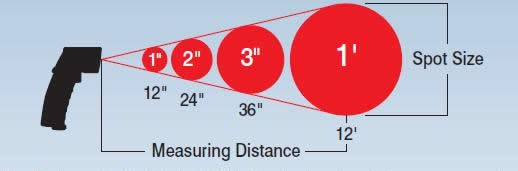
}Finally have a better understanding of the S:D ratio that is given on commercial non-contact temperature sensor units. The Harbour Freight one that I purchased states that it 6:1 spot to distance ratio, this means that at 6 inches the spot size (area read) is 1 inch and at 12 inches the spot size is 2 inches.A good illustration (from Grainger, shows a 12:1 ratio):
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.