 Daniel
Daniel
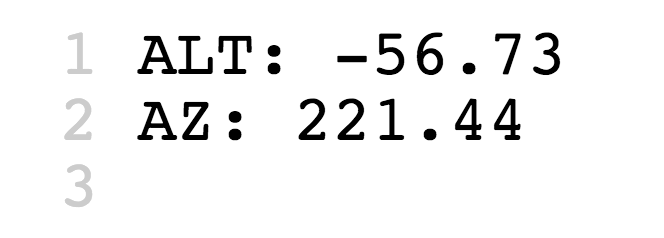
Teaching a lucky cat (maneki-neko 招き猫) to point at the International Space Station!
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
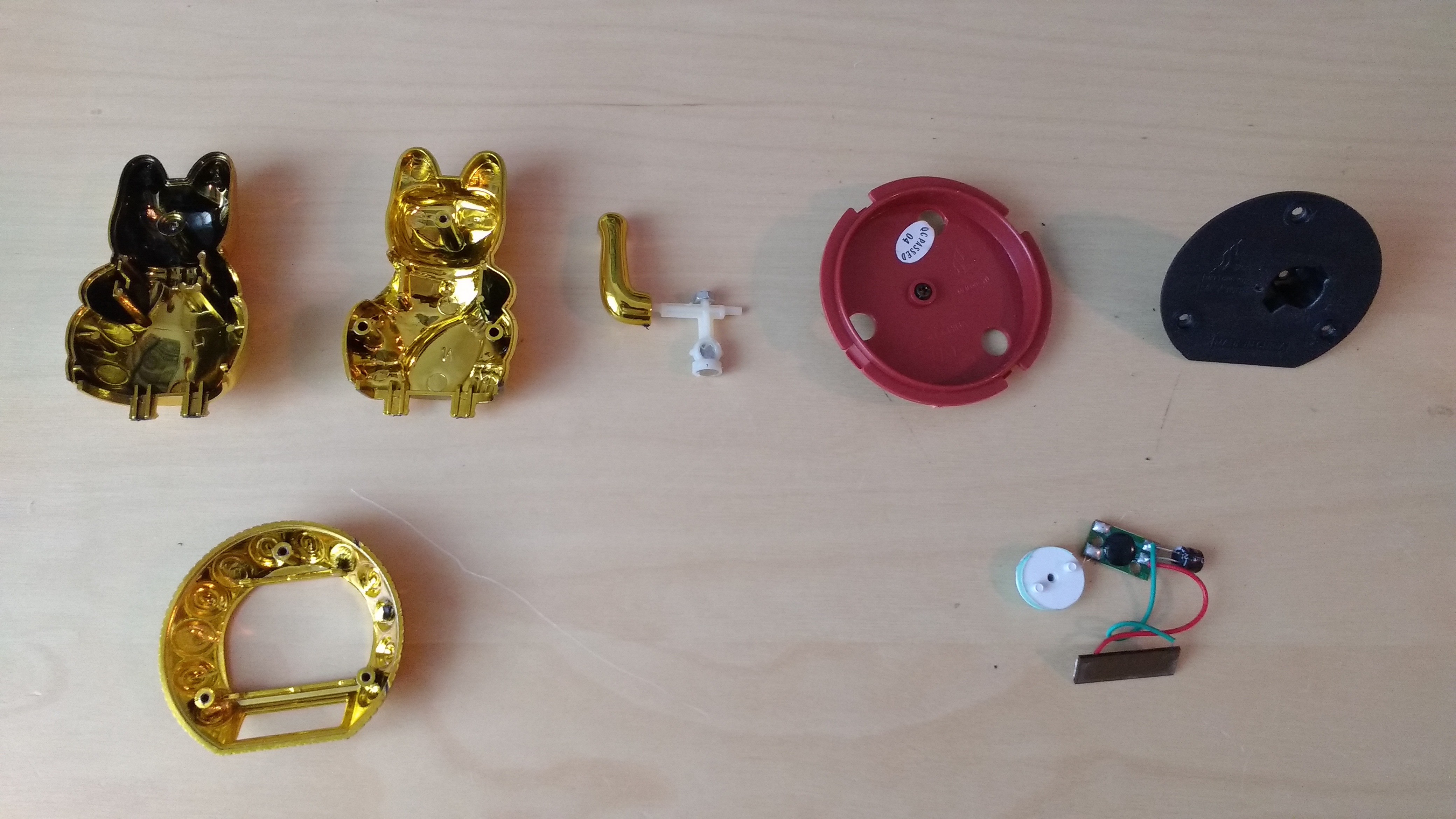
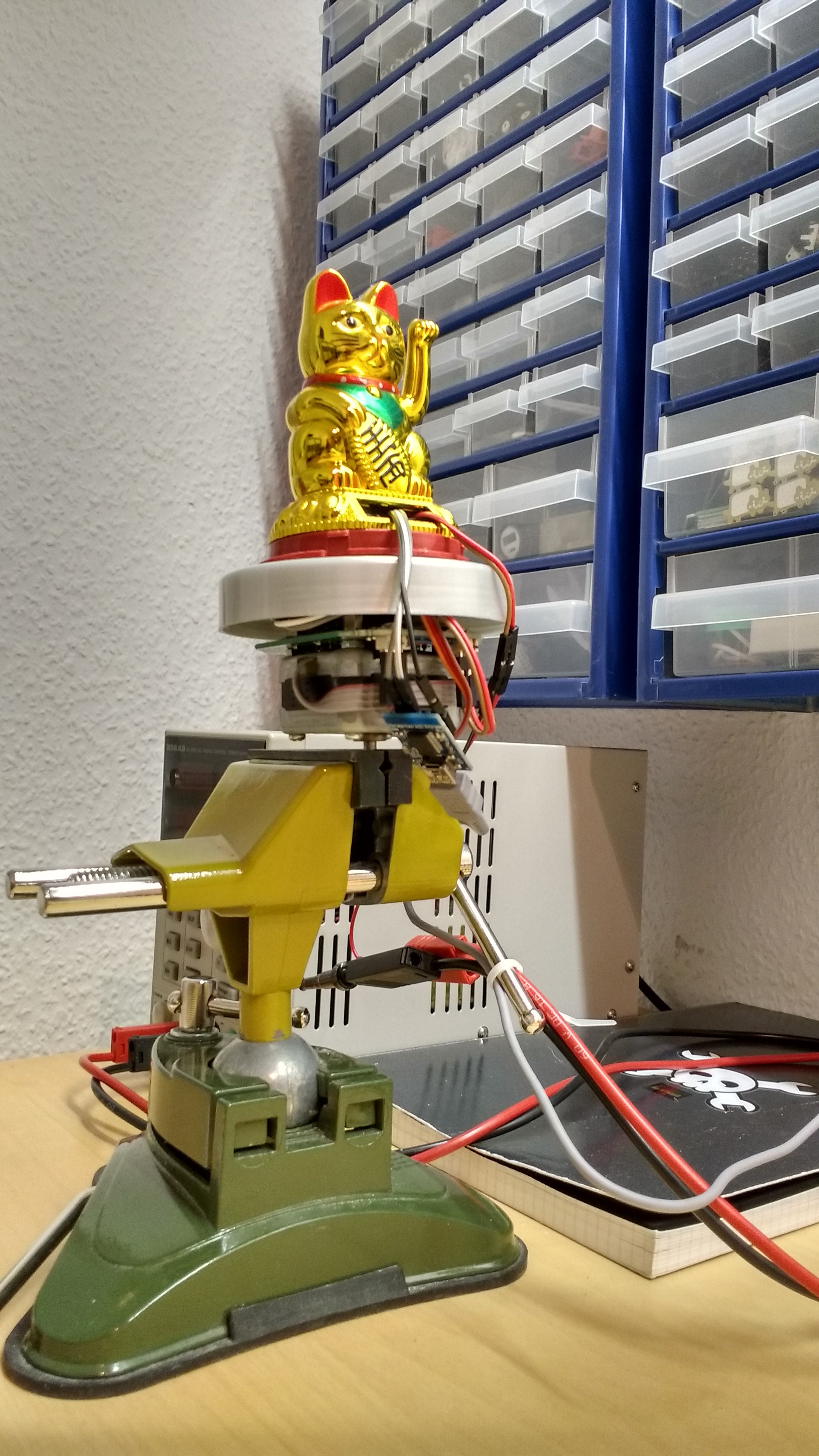
So, the basic components of the system are now working independently:
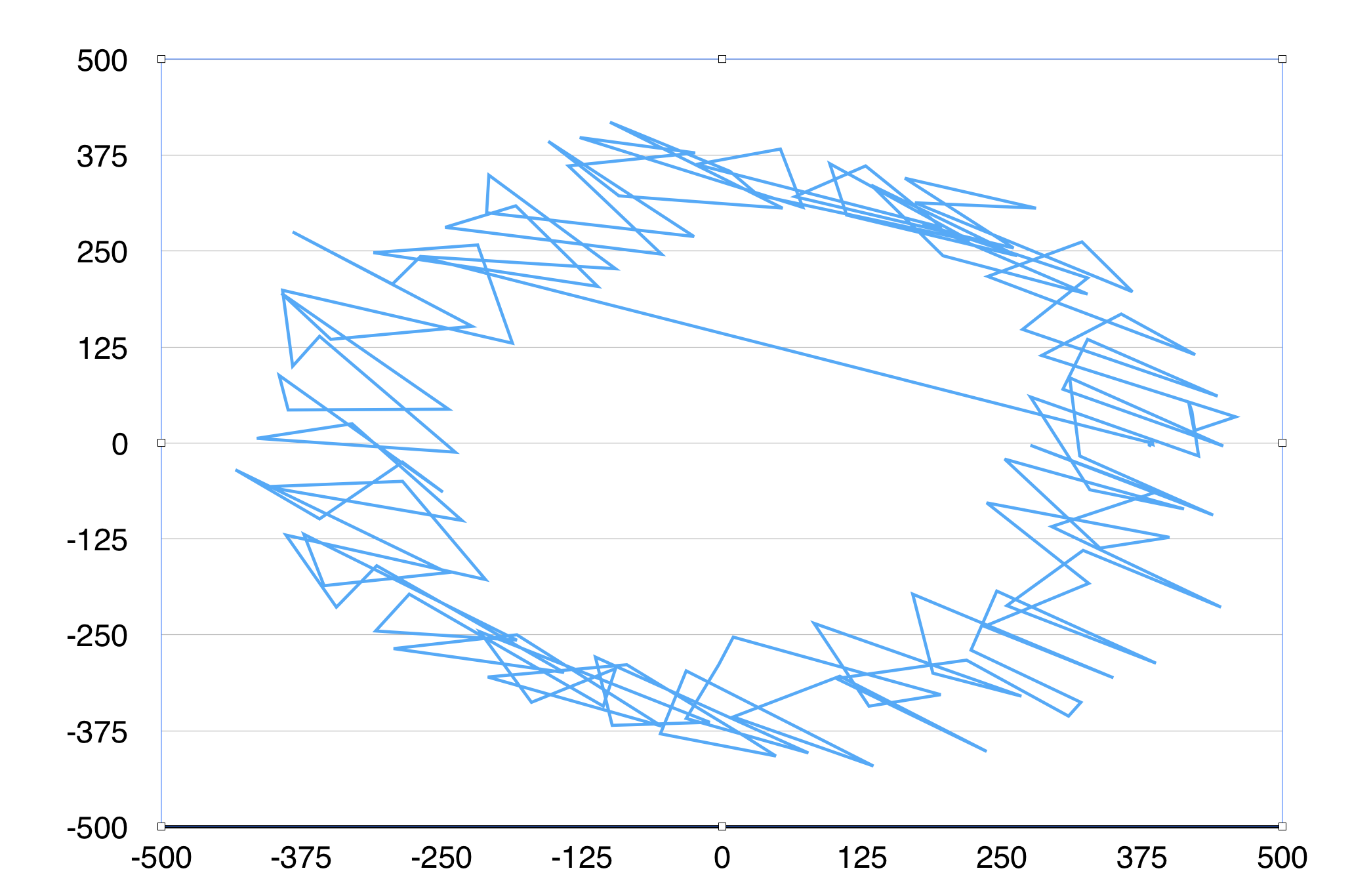
The next step will be to make all these components work together and somehow filter/clean up the compass data :-)

 Ulrich
Ulrich
 Jason Bowling
Jason Bowling
 ThunderSqueak
ThunderSqueak
 @TaiksonTexas
@TaiksonTexas