0%
0%
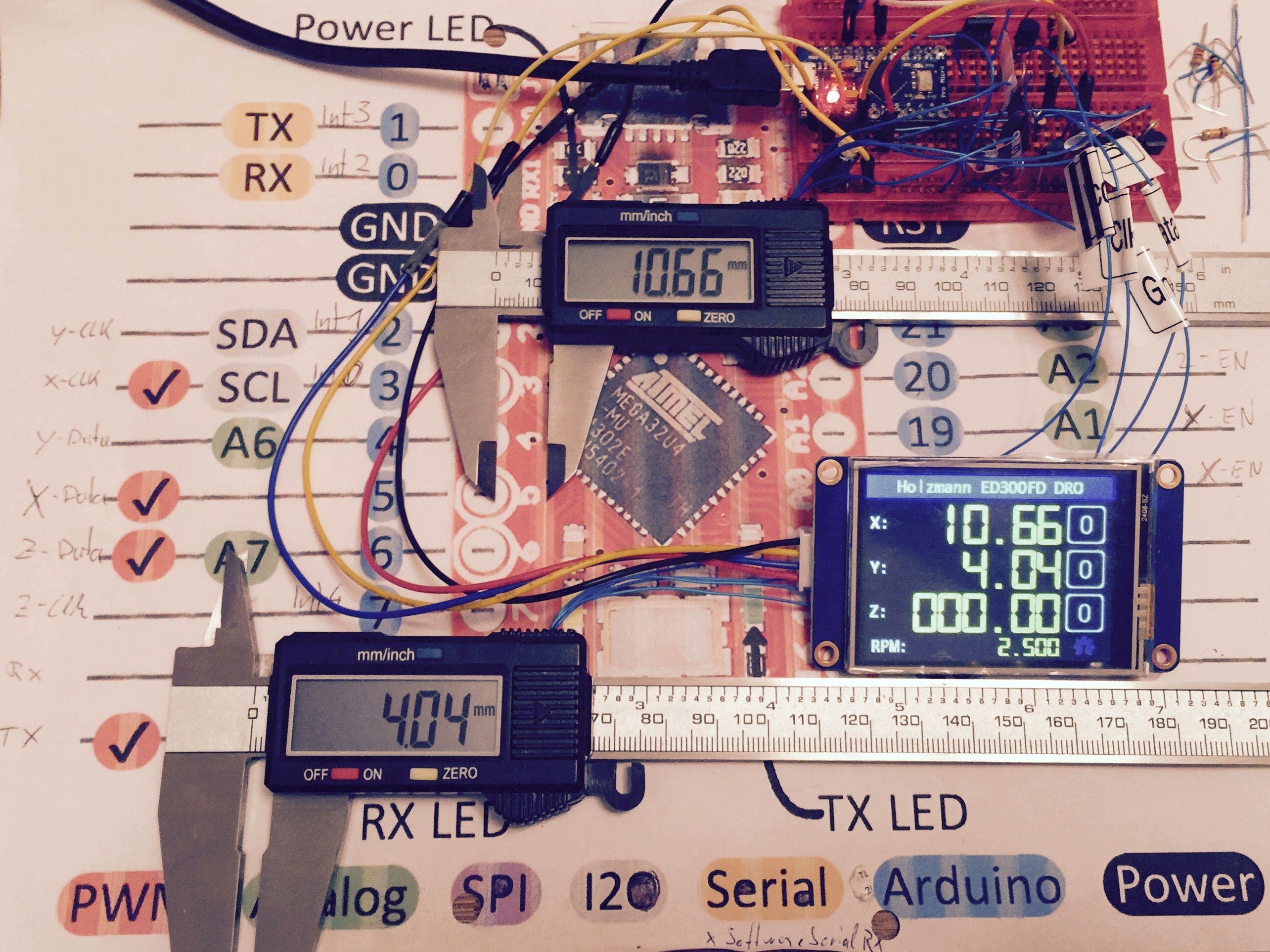
Nextion DRO
2.4" Nextion Display on Holzmann ED300FD Lathe
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Ken Yap
Ken Yap
 Rasmus Svensson
Rasmus Svensson
 Mangus Tiranus
Mangus Tiranus
Show the video please, how the DRO.