 Morning.Star
Morning.StarWell I've spent the last two out of three days laid up on the sofa shaking and sweating after being possessed by the most outrageous Flu. I'm feeling a bit better today thankfully, and I can work without dripping on the cardboard. Lovely...
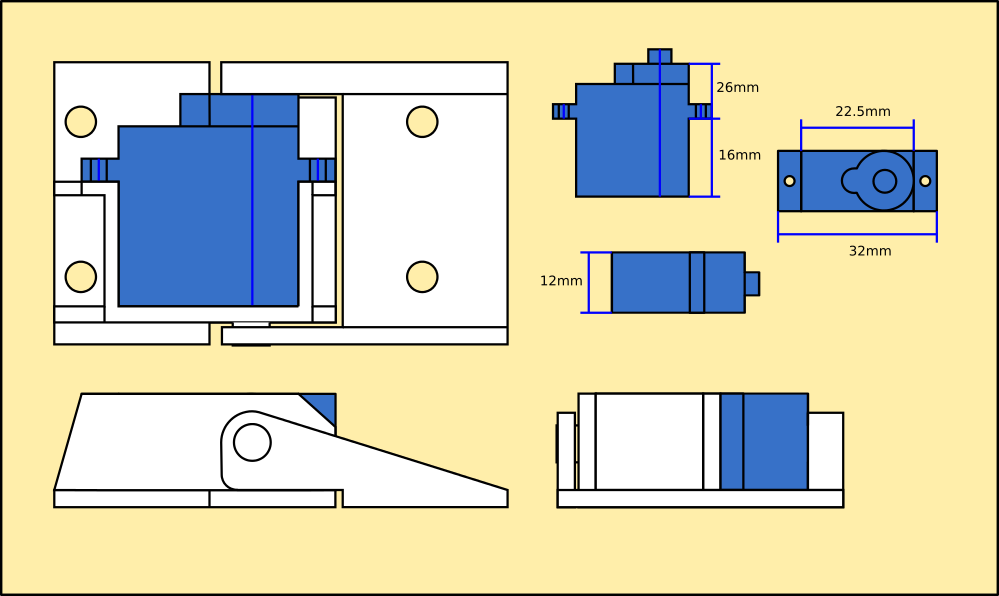
I was also really peeved to find out that the servos I ordered are a completely different size to the others. I carefully collected a range of servos and measured them all after discovering that the standard needed standardising. I really hate this behaviour - standards are what they are for a reason, either stick to them or abandon them because anything else is a mockery.
Metal Gear servos (at least, these ones) are a good 5mm taller above the mounting points than all the plastic ones. The motor shaft is physically longer, and the black nylon actuators supplied with each are also much heavier. The motor box is also a lot longer than the biggest plastics too.

There was absolutely no need for this, the hardware is identical but for size. I can understand what Futuba did to the standards for heavier servos, but that crud is just irritating. There's 5mm of dead space in the bottom the motor box, all it would have taken was to move the bearer points up so that they were the same.
Hobby Servo motors are rubbish and have been around as long as i have. They have not changed in all that time. Considering I've been using them with MCU's as part of powered hinges like everyone else for a decade, why have they not been redesigned as hinges?
@Dylan C. is working on a design like this so that we can interface them to something other than Wright Bros technology.
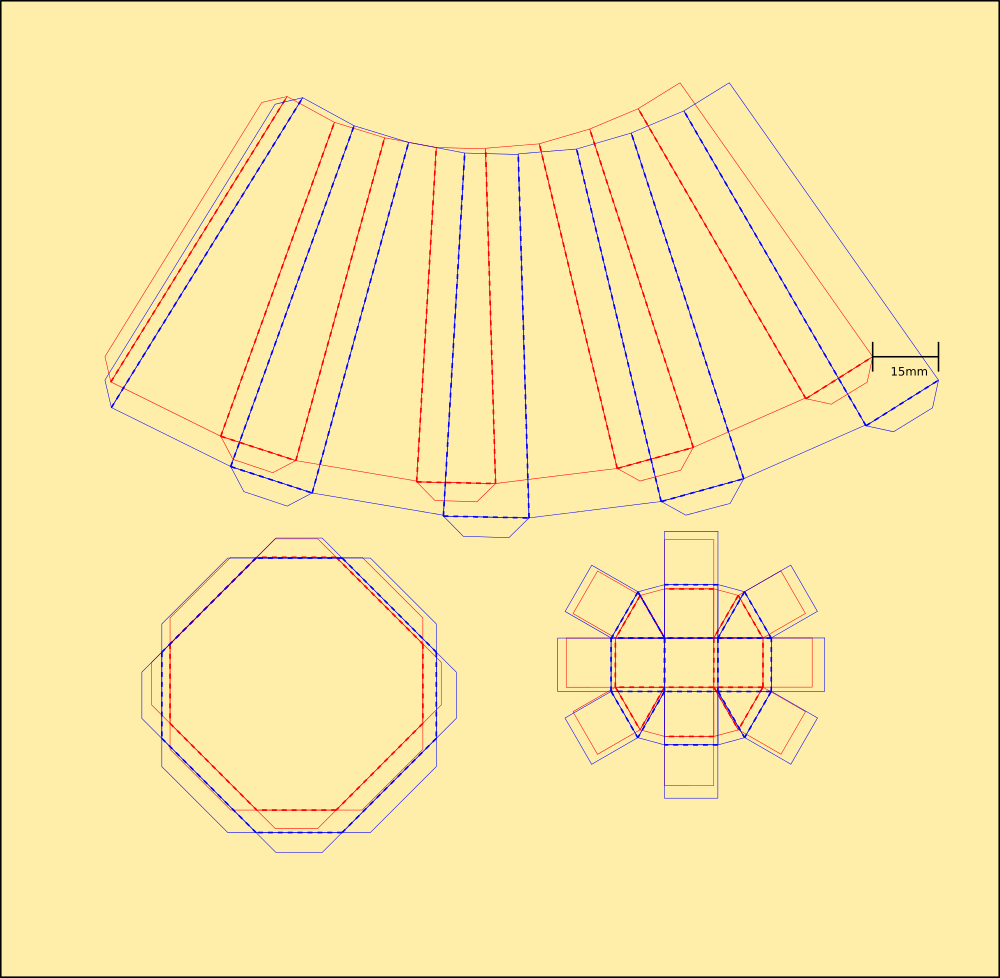
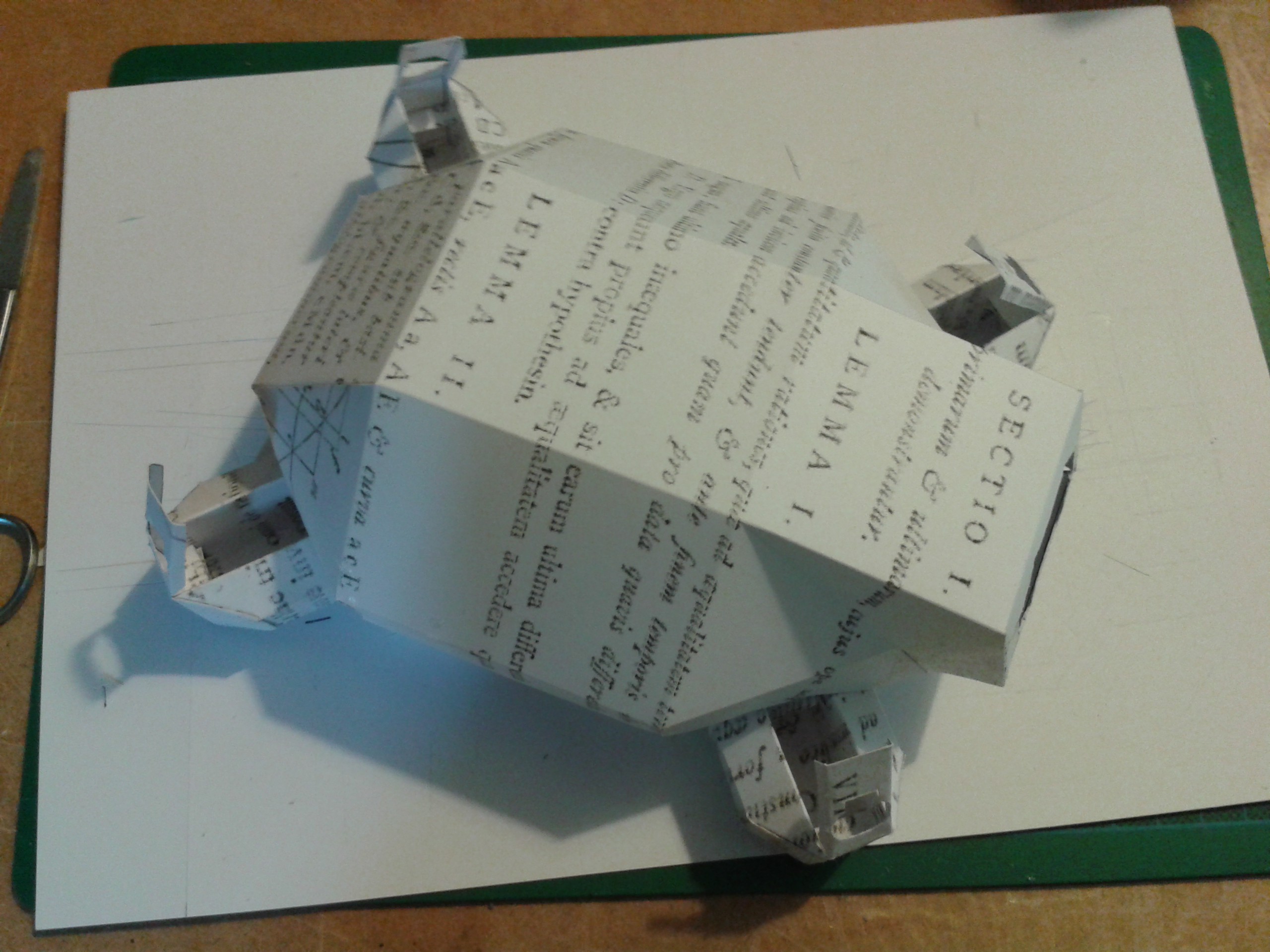
Its probably going to be 3D printed, but I have been working on ways of getting around a lack of such technology. Origaime is a harsh mistress :
Cut and scored from Polyethylene, this is repeatable and sort of works.
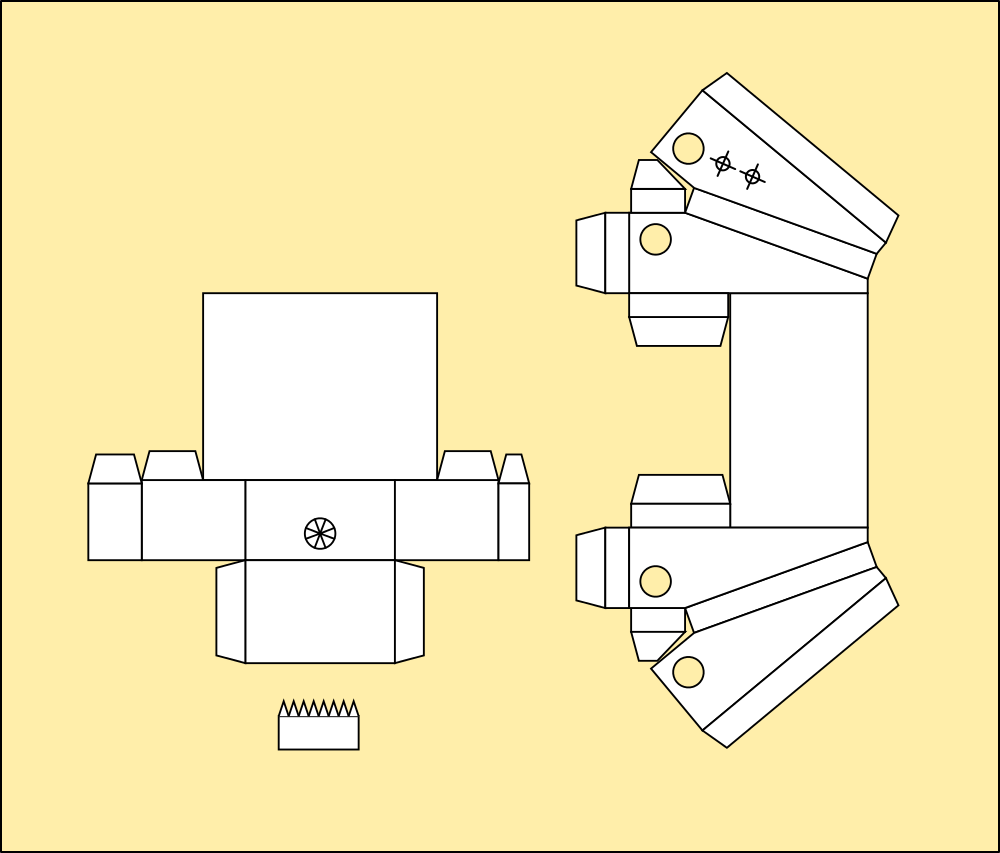
Other modifications were needed for the bigger servos. I discovered that they no longer fit between the cheeks of the saddle units, although I had allowed enough depth in the thigh sections for them to fit. This meant completely rescaling the limbs, which I have now done. One of the reasons for designing the limb parts this way is scalability. Because the new servos are 5mm longer, the saddle template would have to be 15mm longer around it's perimeter. Because of the unitary nature, all the sub-dimensions are related to the overall scale:
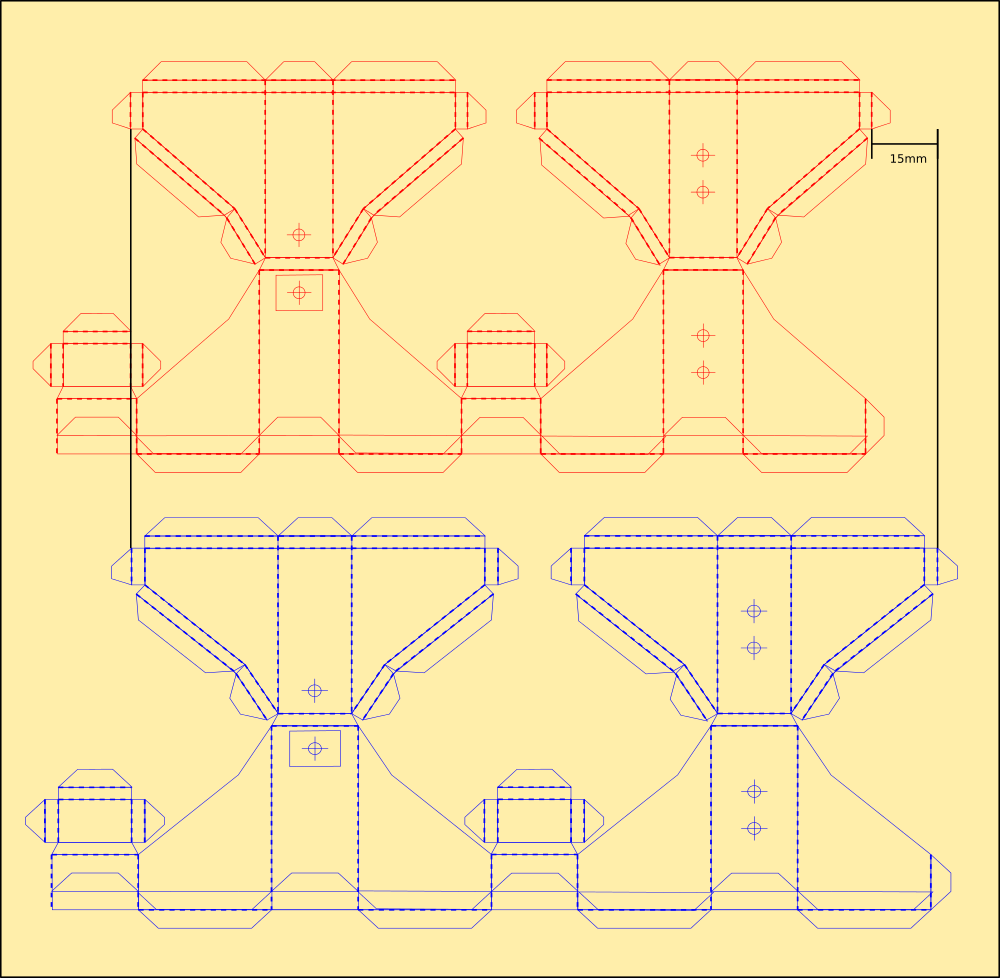
The same procedure is applied to anything that part interfaces with. The lower limb shell needed stretching to match the new saddle, I just scaled the entire thing including the foot and internal brace.
I chose a new design for the skin of the fully operational shell. Form and function still ringing in my brain, I decided that the original text from Newton's Principia - The Motion of Bodies seemed particularly appropriate.
The apple never falls far from the tree
And just like another famous apple, this one also stands on the shoulders of giants. The only difference is, I'm making a point of it, and not a fortune. There's a big difference between artistic license and outright theft of IP. Coincidentally those two letters precede everything they've done.
Take a hike hosers. I've been doing this for years.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.