 EjaadTech
EjaadTechThe power supply and the sensor input portion schematic: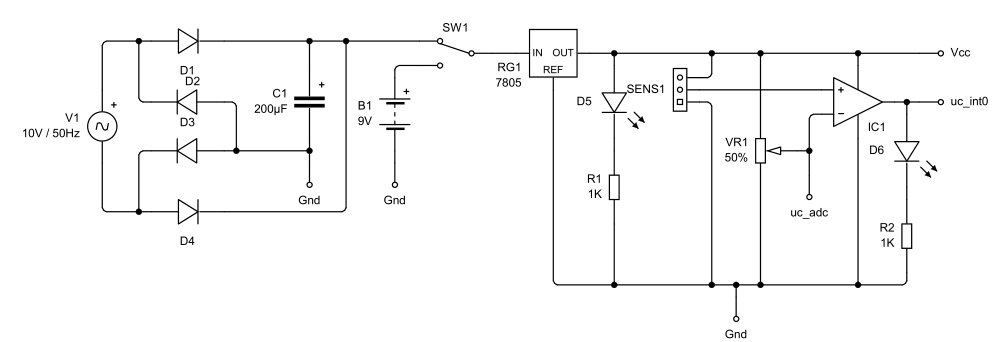
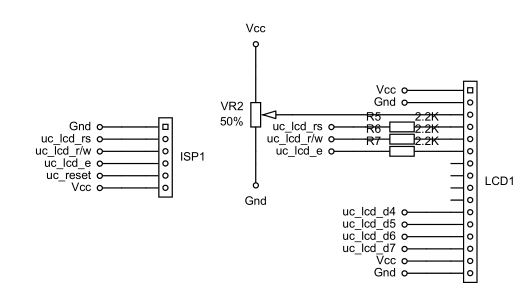
Connectors for LCD and ISP
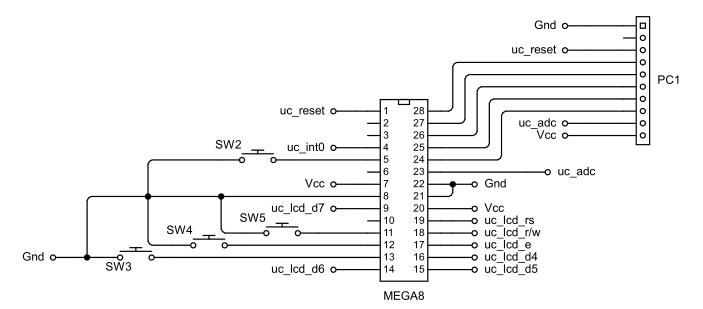
The controller portion, ATMEGA8
The source code is provided below in the READ MORE LINK, otherwise the project page would have gone a bit too long, for ALL the files related to the project, use this link: http://zaidpirwani.com/1246/tachtastic-avr-tachometer-2/
The Code: [ALL OF IT]
// Tachtastic 2.0
// By The iTeam
// ATmega8 - 8MHz Internal
// Sensor - INT0 at PD.2
// T0 Overflow Interrupt
// 16x2 LCD at PB0-6 in 4-bit Mode
// START/Stop/Exit BTN at PD.3
// Menu/Select BTN at PD.5
// Next BTN at PD.7
// Prev BTN at PD.6
// COUNT#######TIME - LCD FORMAT
// -RPM-#######-Hz- - LCD FORMAT
#include <stdlib.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#include "lcd.h"
// For Simplifying Bitvise Operations
#define CLEAR(port,pin) PORT ## port &= ~(1<<pin)
#define SET(port,pin) PORT ## port |= (1<<pin)
#define TOGGLE(port,pin) PORT ## port ^= (1<<pin)
#define READ(port,pin) PIN ## port & (1<<pin)
#define BITVAL(n) (1<<(n))
#define DB_DELAY 10 // Debounce Delay - in ms
#define START 3
#define MENU 5
#define NEXT 7
#define PREV 6
void init_all();
void print_title();
void print_int(unsigned char x, unsigned char y, unsigned int temp);
void count_rev();
void comp_volt();
// Global Variables
unsigned long
inc = 0,
cnt = 0,
cnt1 = 0,
cnt2 = 0,
cnt3 = 0,
time = 0,
count = 0,
temp = 0,
countpr= 1;
// Counts Per Revolution
unsigned char
menu_index = 0, // 1:Count/Rev, 2:Comp V
status = 0, // 0:Normal, 1:Measuring, 2: Menu, 3: Setting
reset = 0,
compvolt = 0;
// Boolean - 0: NOT in 1, 1:Comp V Setting
char tempstr[4];
int main(void) {
init_all();
print_title();
while(1) {
if(~READ(D,START) && status==0) {
// START/STOP/EXIT Button - PortD.3 - Status: Normal
_delay_ms(DB_DELAY);
lcd_clrscr();
inc = 0;
cnt = 0;
cnt1 = 0;
cnt2 = 0;
cnt3 = 0;
time = 0;
count = 0;
status = 1;
reset = 0;
sei();
while(~READ(D,START)) ;
_delay_ms(DB_DELAY);
} else if(~READ(D,START) && status==1) {
// START/STOP/EXIT Button - PortD.3 - Status: Measuring
_delay_ms(DB_DELAY);
while(~READ(D,START)) ;
_delay_ms(DB_DELAY);
cli();
status = 0;
reset = 1;
} else if(~READ(D,START) && status==2) {
// START/STOP/EXIT Button - PortD.3 - Status: Menu
_delay_ms(DB_DELAY);
cli();
status = 0;
print_title();
while(~READ(D,START)) ;
_delay_ms(DB_DELAY);
}
if(~READ(D,MENU) && status==0 && reset==0) {
// MENU/SELECT Button - PD.5 - Status: Normal
_delay_ms(DB_DELAY);
lcd_clrscr();
lcd_gotoxy(0,0);
lcd_puts("> Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts(" Comparator V");
menu_index = 1;
status = 2;
while(~READ(D,MENU)) ;
_delay_ms(DB_DELAY);
} else if(~READ(D,MENU) && status==0 && reset==1) {
// MENU/SELECT Button - PD.5 - Status: Normal-BLANK
_delay_ms(DB_DELAY);
cli();
status = 0;
reset = 0;
print_title();
while(~READ(D,MENU)) ;
_delay_ms(DB_DELAY);
} else if(~READ(D,MENU) && status==2) {
// MENU/SELECT Button - PD.5 - Status: Menu
_delay_ms(DB_DELAY);
status = 3;
switch(menu_index) {
case 1:
// Counts / Revolutions
count_rev();
break;
case 2:
// Comparator Voltage
compvolt = 1;
comp_volt();
break;
}
while(~READ(D,MENU)) ;
_delay_ms(DB_DELAY);
} else if(~READ(D,MENU) && status==3) {
// MENU/SELECT Button - PortD.5 - Status: In Setting
_delay_ms(DB_DELAY);
lcd_clrscr();
lcd_gotoxy(0,0);
if(menu_index==1) {
lcd_puts("> Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts(" Comparator V");
} else {
lcd_puts(" Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts("> Comparator V");
compvolt = 0;
}
status = 2;
compvolt = 0;
temp = 0;
ADCSRA = 0b10000000;
while(~READ(D,MENU)) ;
_delay_ms(DB_DELAY);
}
if(~READ(D,NEXT) && status==2) {
// Next Button - PortD.7 - Status: In-Menu
_delay_ms(DB_DELAY);
while(~READ(D,NEXT)) ;
_delay_ms(DB_DELAY);
lcd_clrscr();
lcd_gotoxy(0,0);
if(menu_index==1) {
lcd_puts(" Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts("> Comparator V");
menu_index = 2;
status = 2;
} else if(menu_index==2) {
lcd_puts("> Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts(" Comparator V");
menu_index = 1;
status = 2;
}
} else if(~READ(D,NEXT) && status==3 && menu_index==1) {
// Next Button - PortD.7 - Status: In-Setting
_delay_ms(DB_DELAY);
countpr++;
count_rev();
while(~READ(D,NEXT)) ;
_delay_ms(DB_DELAY);
}
if(~READ(D,PREV) && status==2) {
// Prev Button - PortD.6 - Status: In-Menu
_delay_ms(DB_DELAY);
while(~READ(D,PREV)) ;
_delay_ms(DB_DELAY);
lcd_clrscr();
lcd_gotoxy(0,0);
if(menu_index==1) {
lcd_puts(" Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts("> Comparator V");
menu_index = 2;
status = 2;
} else if(menu_index==2) {
lcd_puts("> Counts / Rev");
lcd_gotoxy(0,1);
lcd_puts(" Comparator V");
menu_index = 1;
status = 2;
}
} else if(~READ(D,PREV) && status==3 && menu_index==1) {
// Prev Button - PortD.6 - Status: In-Setting
_delay_ms(DB_DELAY);
if(countpr>1)
countpr--;
count_rev();
while(~READ(D,PREV)) ;
_delay_ms(DB_DELAY);
}
if(compvolt) {
// Show Voltage on LCD
unsigned char adcval=0;
ADCSRA = 0b11000111;
while(ADCSRA & BITVAL(ADSC)) ;
ADCSRA |= BITVAL(ADIF);
adcval = (ADCH*50)/255;
temp++;
if(temp>5000) {
lcd_gotoxy(3,1);
itoa(adcval/10,tempstr,10);
lcd_puts(tempstr);
lcd_puts(".");
itoa(adcval%10,tempstr,10);
lcd_puts(tempstr);
lcd_puts(" Volts ");
temp = 0;
}
}
}
return(0);
}
void comp_volt() {
lcd_clrscr();
lcd_gotoxy(0,0);
lcd_puts(" Comp. Voltage ");
}
void count_rev() {
lcd_clrscr();
lcd_gotoxy(0,0);
lcd_puts(" Counts / Rev ");
lcd_gotoxy(2,1);
lcd_puts("-");
lcd_gotoxy(6,1);
itoa(countpr,tempstr,10);
lcd_puts(tempstr);
lcd_gotoxy(11,1);
lcd_puts("+");
}
void print_int(unsigned char x, unsigned char y, unsigned int temp) {
char tempstr[4];
if(temp) {
itoa(temp,tempstr,10);
lcd_gotoxy(x,y);
lcd_puts(tempstr);
} else {
lcd_gotoxy(x,y);
lcd_puts(" ");
}
}
void print_title() {
lcd_init(LCD_DISP_ON);
lcd_clrscr();
_delay_ms(500);
lcd_puts(" Tach-Tastic");
_delay_ms(500);
lcd_gotoxy(0,1);
lcd_puts("iTeam IIEE");
}
void init_all() {
GICR = 0b01000000;
// INT0: On
MCUCR = 0b00000011;
// Mode: Rising Edge
TCCR0 = 0b00000101;
// TC0 Init - Mode: Normal
TCNT0 = 0b00000000;
// Clock source: System Clock/1024
TIMSK = 0b00000001;
// OC0 output: Disconnected
ADMUX = 0b00100000;
// ADC00 at PC.0
ADCSRA = 0b00000111;
// ADC Disabled
cli();
// Disbale all Interrupts
DDRB = 0xFF;
// PortB Output
DDRD = 0x00;
// PortC Input
PORTD = 0xFF;
// Pulled Up
}
ISR(INT0_vect) // INT0 Routine {
cnt++;
count++;
print_int(0,0,count);
}
ISR(TIMER0_OVF_vect) // Timer0 Overflow Routine {
inc++;
if(inc>30) {
time++;
cnt3 = cnt2;
cnt2 = cnt1;
cnt1 = cnt/countpr;
print_int(12,0,time);
print_int(0,1,((cnt1+cnt2+cnt3)/3)*60);
print_int(12,1,(cnt1+cnt2+cnt3)/3);
inc = 0;
cnt = 0;
}
}