 Paul Crouch
Paul CrouchOk, so I know what I'm doing for pitch and roll and I think I've got workable plan for lifting, but I'm still not sure how I'm now going to spin the whole assembly as I've moved away from the original drive (I was never 100% happy with it anyway).
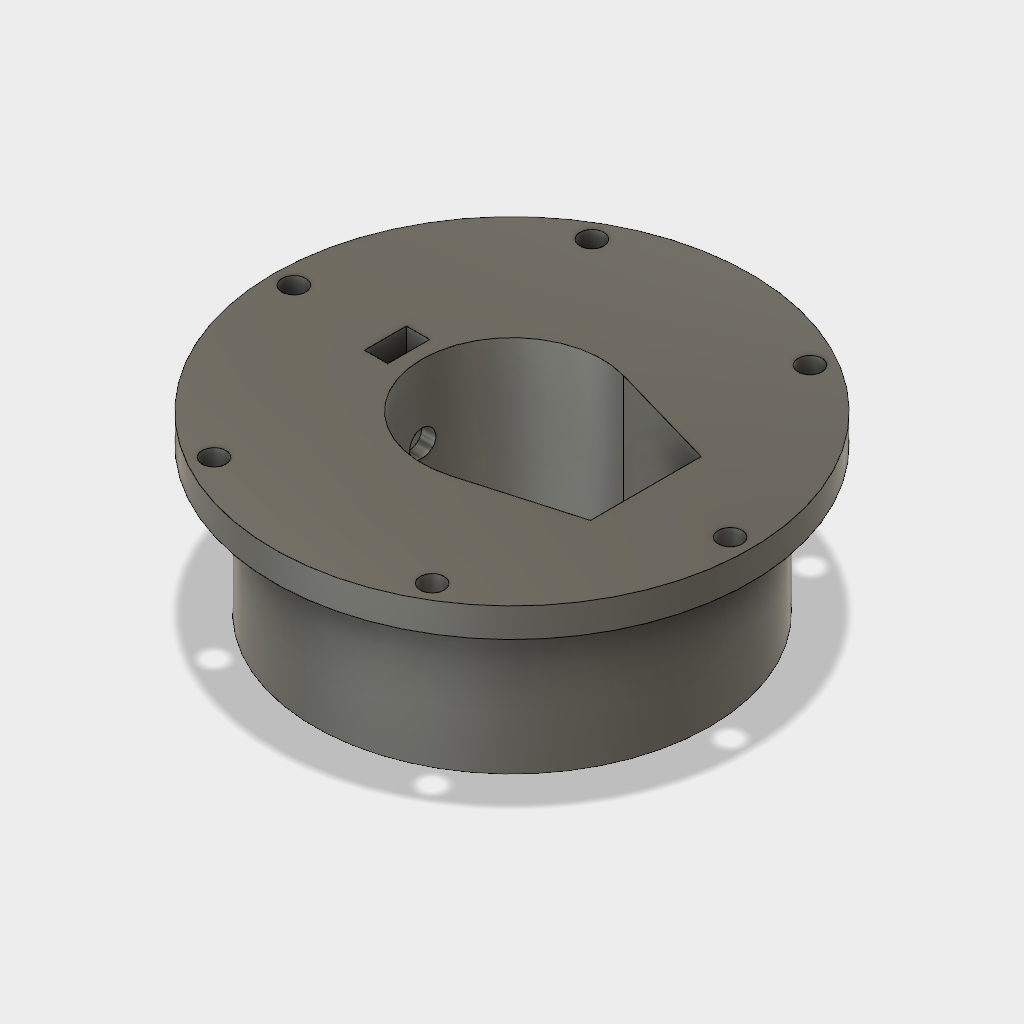
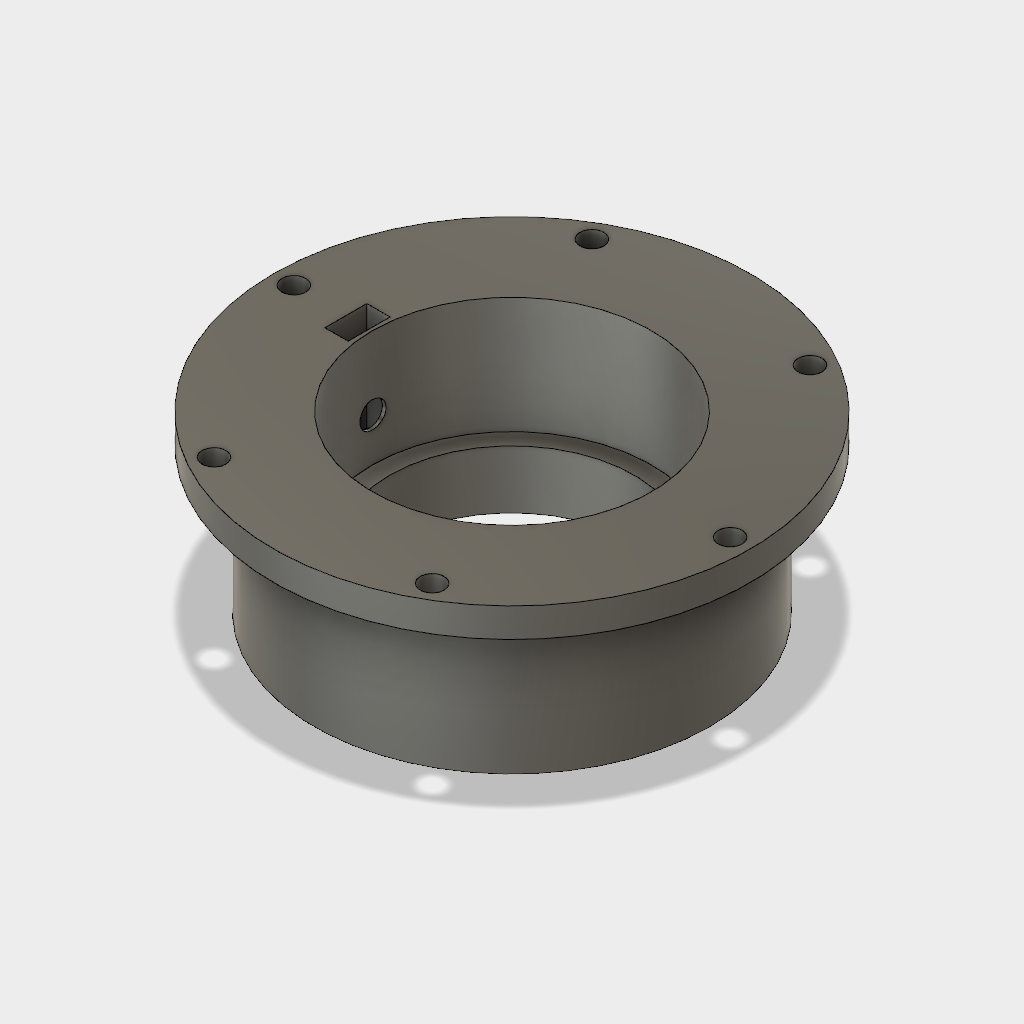
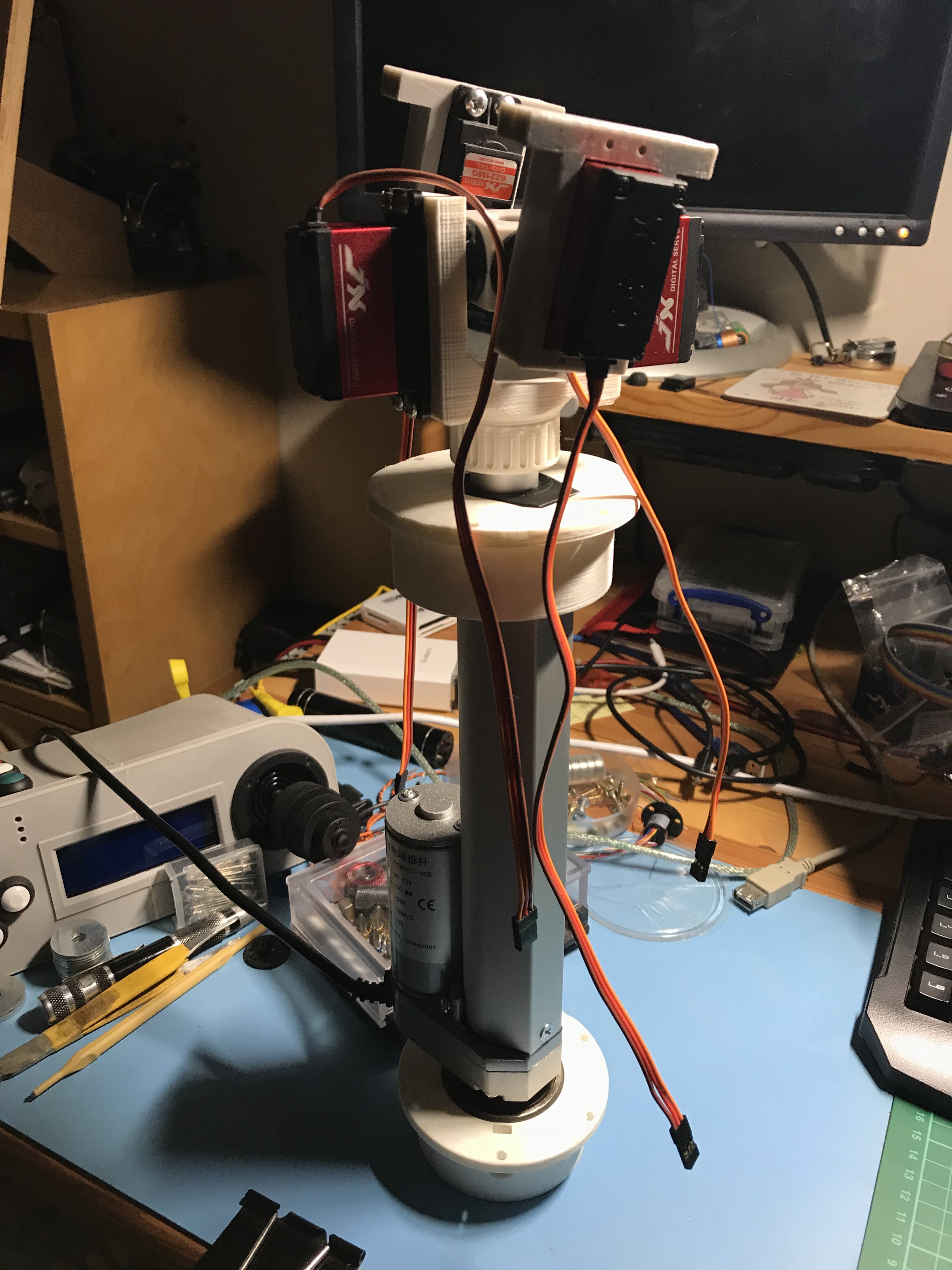
So the new pitch-roll head design sits on top of a linear actuator which will itself be clamped vertically in the centre of the main chassis able to turn with the head bearing. The bottom has its own bearing and will be supported from the bottom of the chassis.
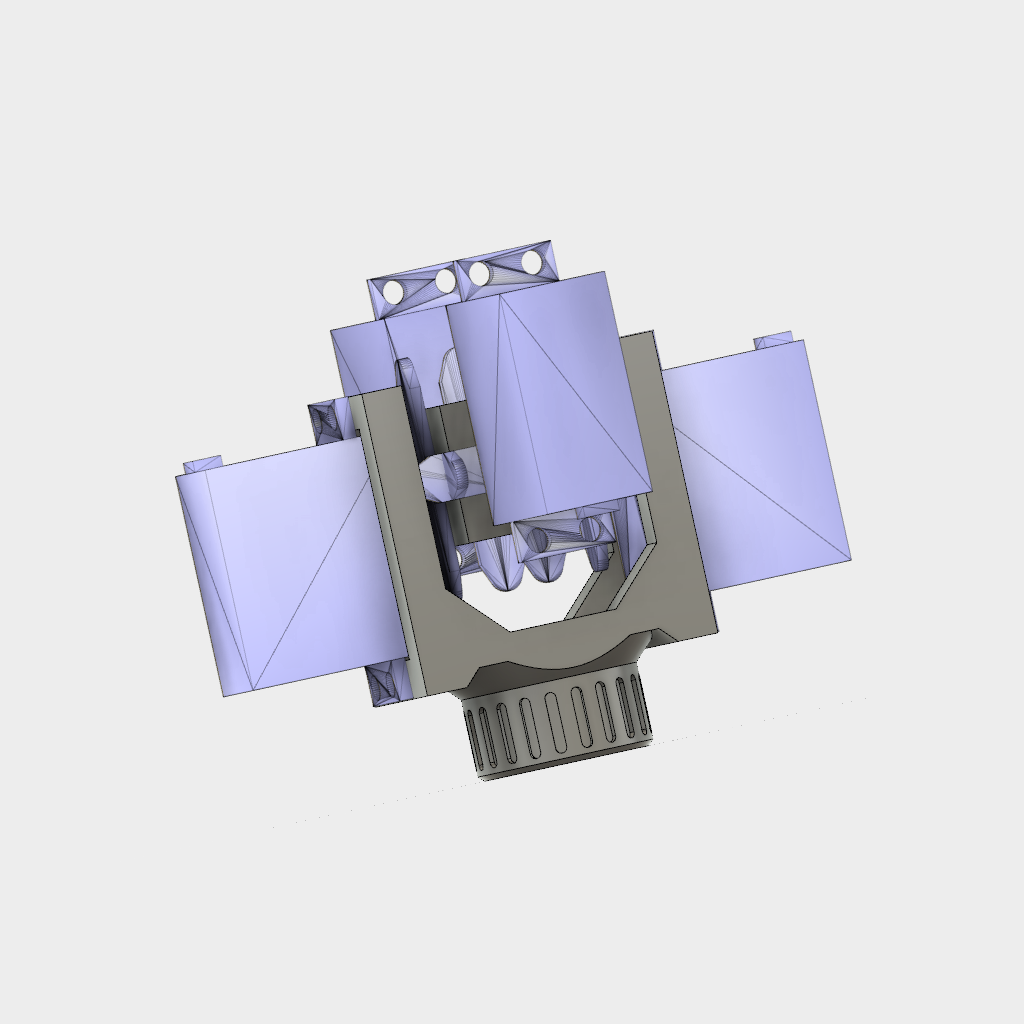
One linear actuator, an old bearing from my motorbike headstock, some 20Kg/cm servos and some 3D printed parts...
I'm really quite keen to get some fundamental motion happening with this. Going to need a fairly beefy slip-ring first though. I'm probably going to using some small bearings...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.