0%
0%
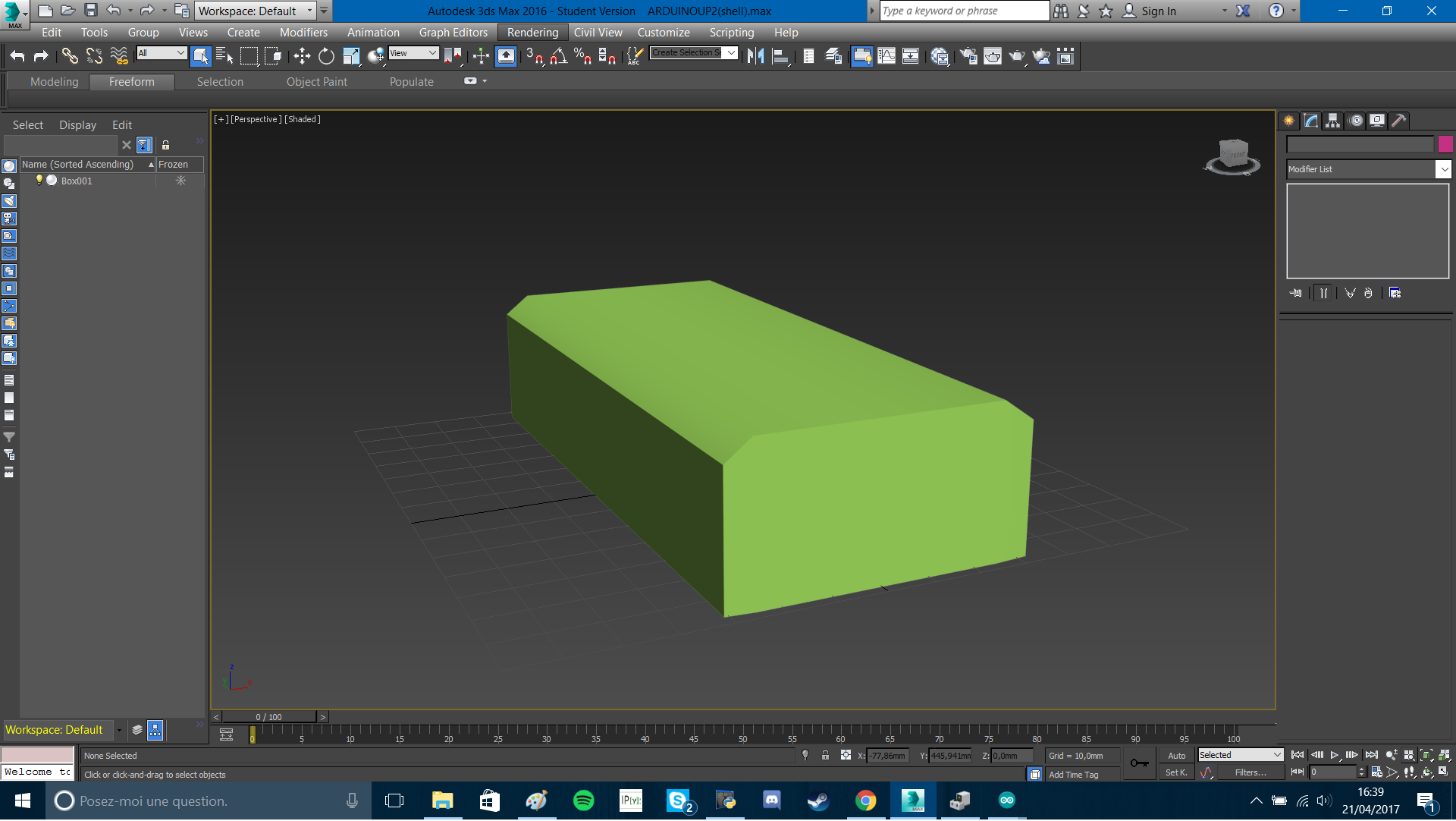
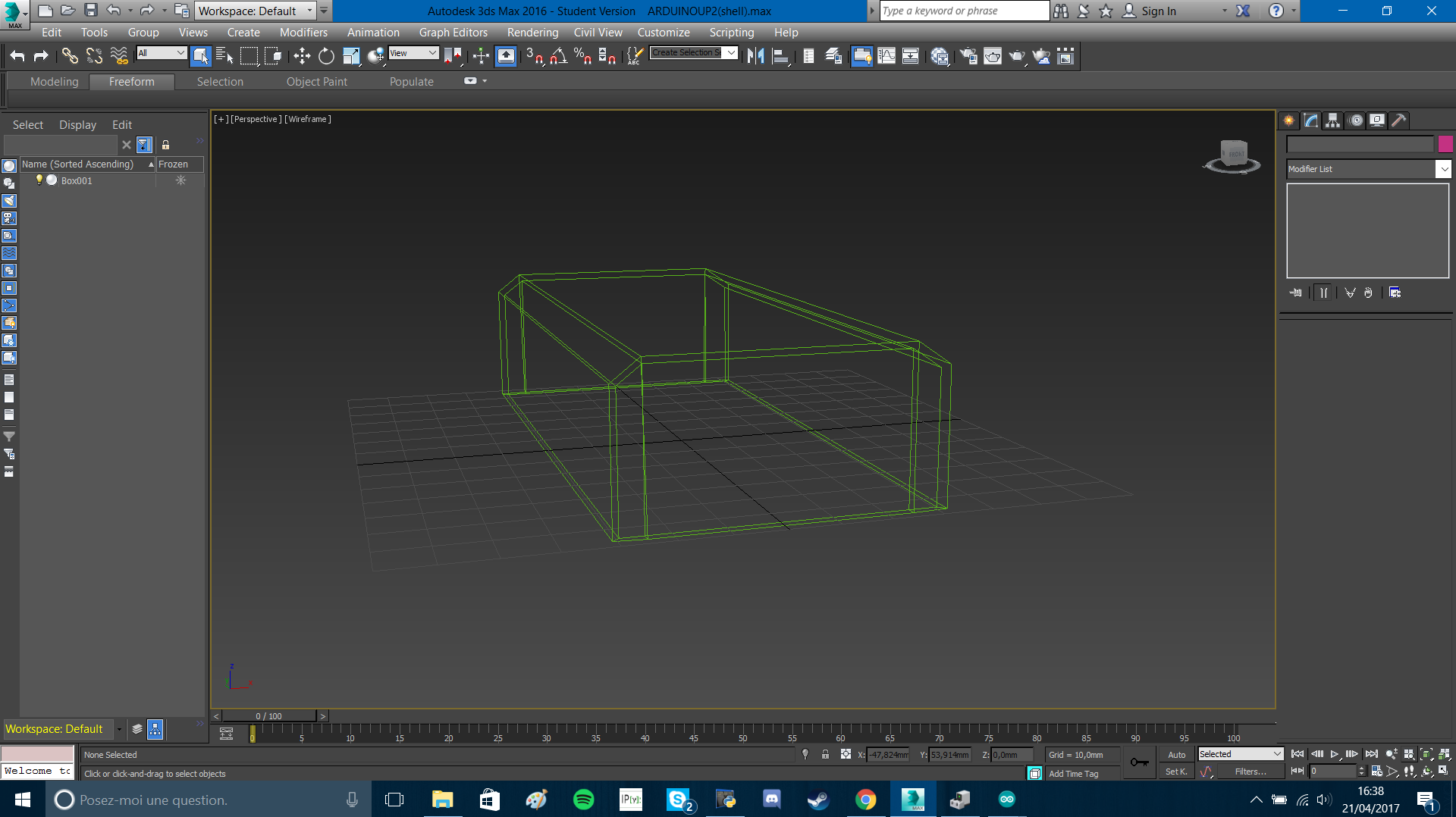
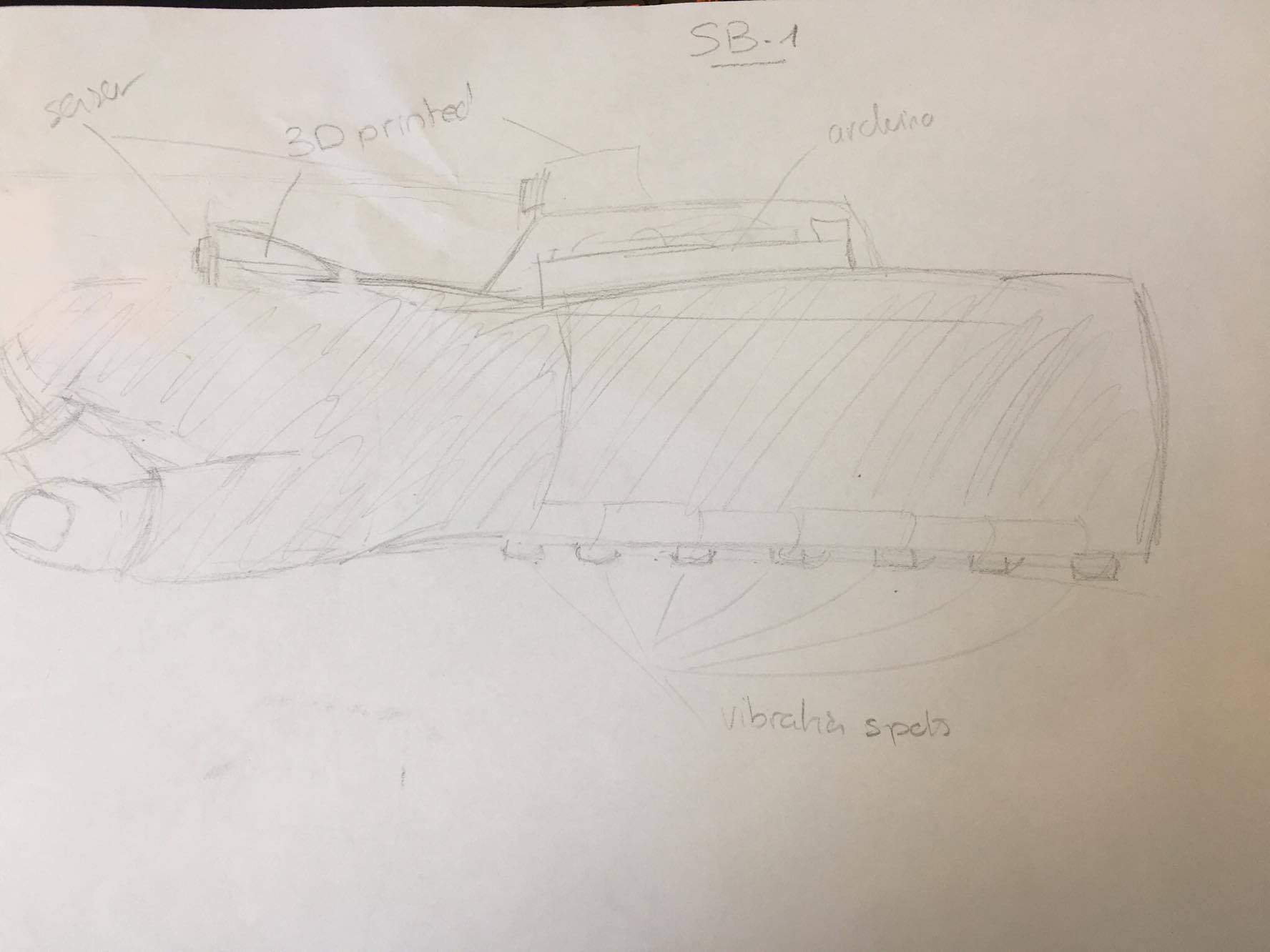
Sonar Blind Project
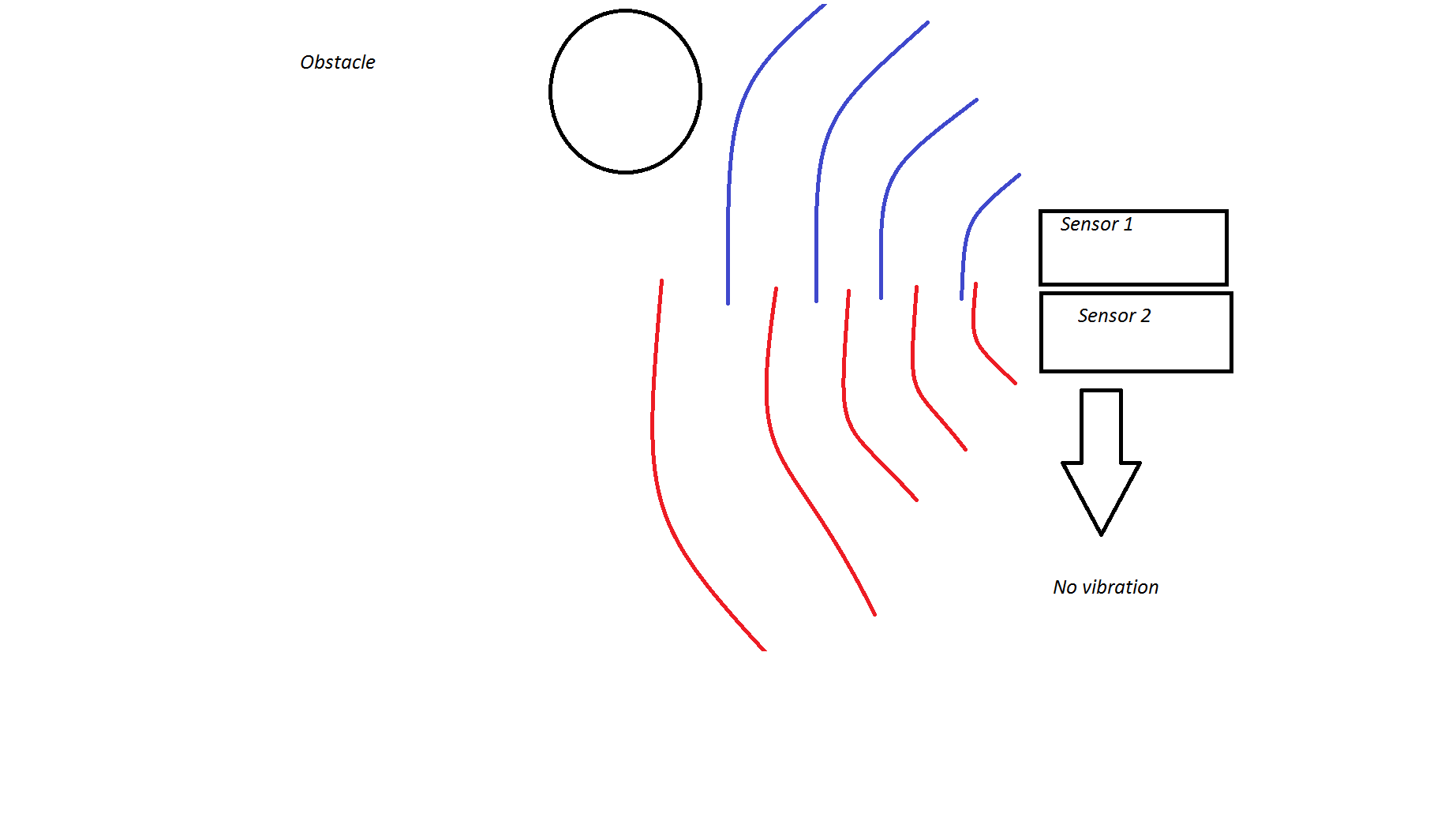
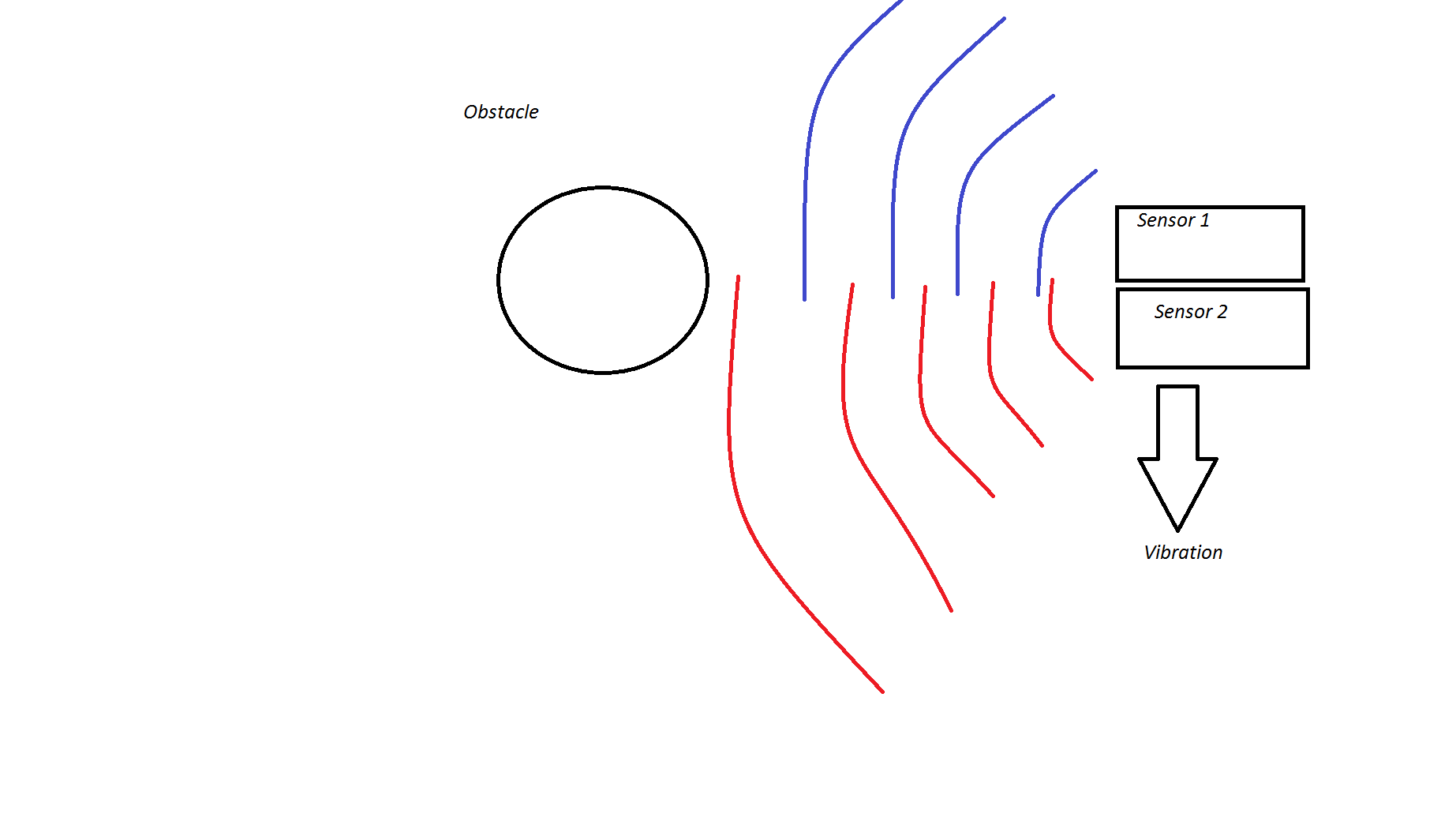
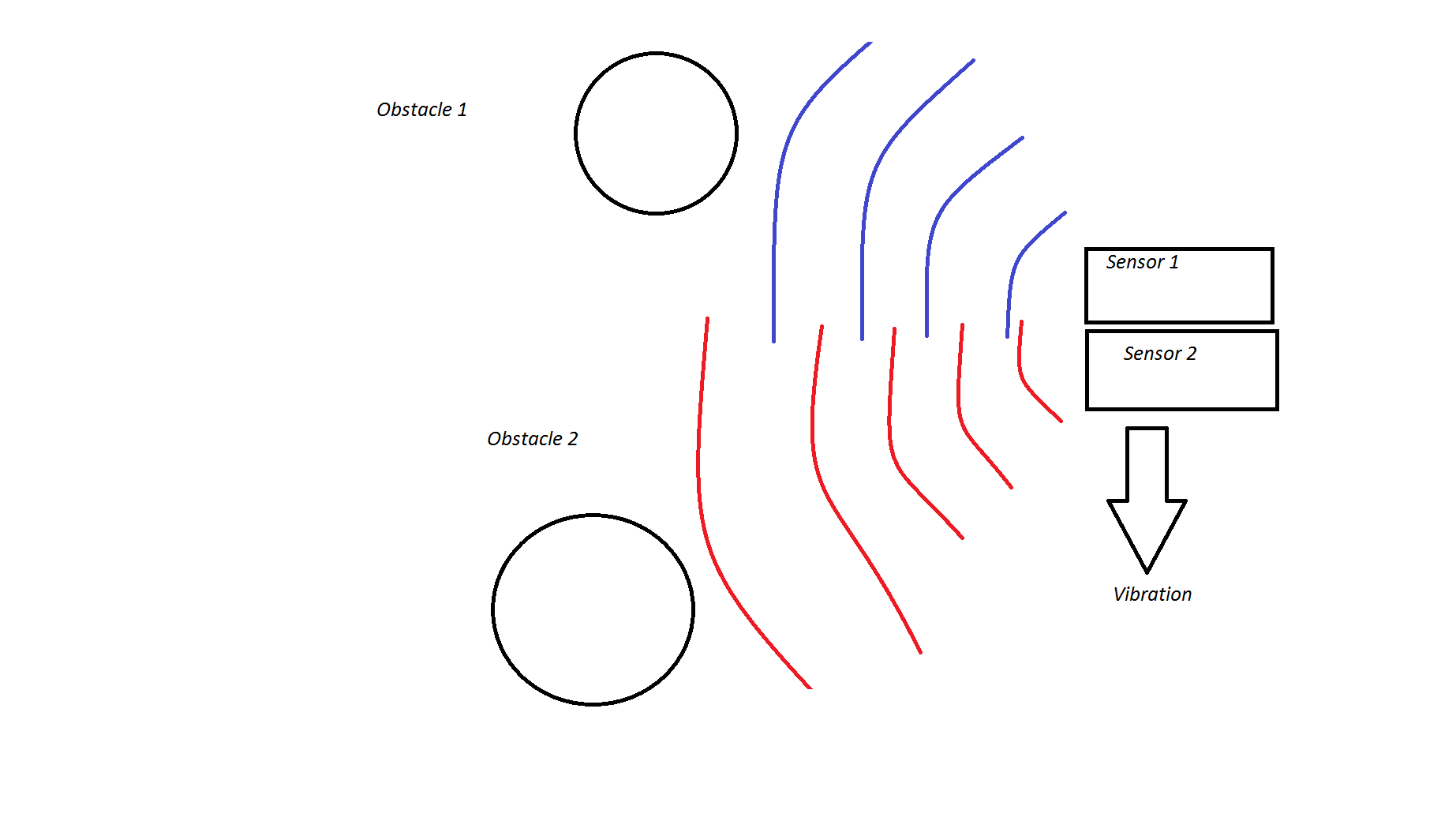
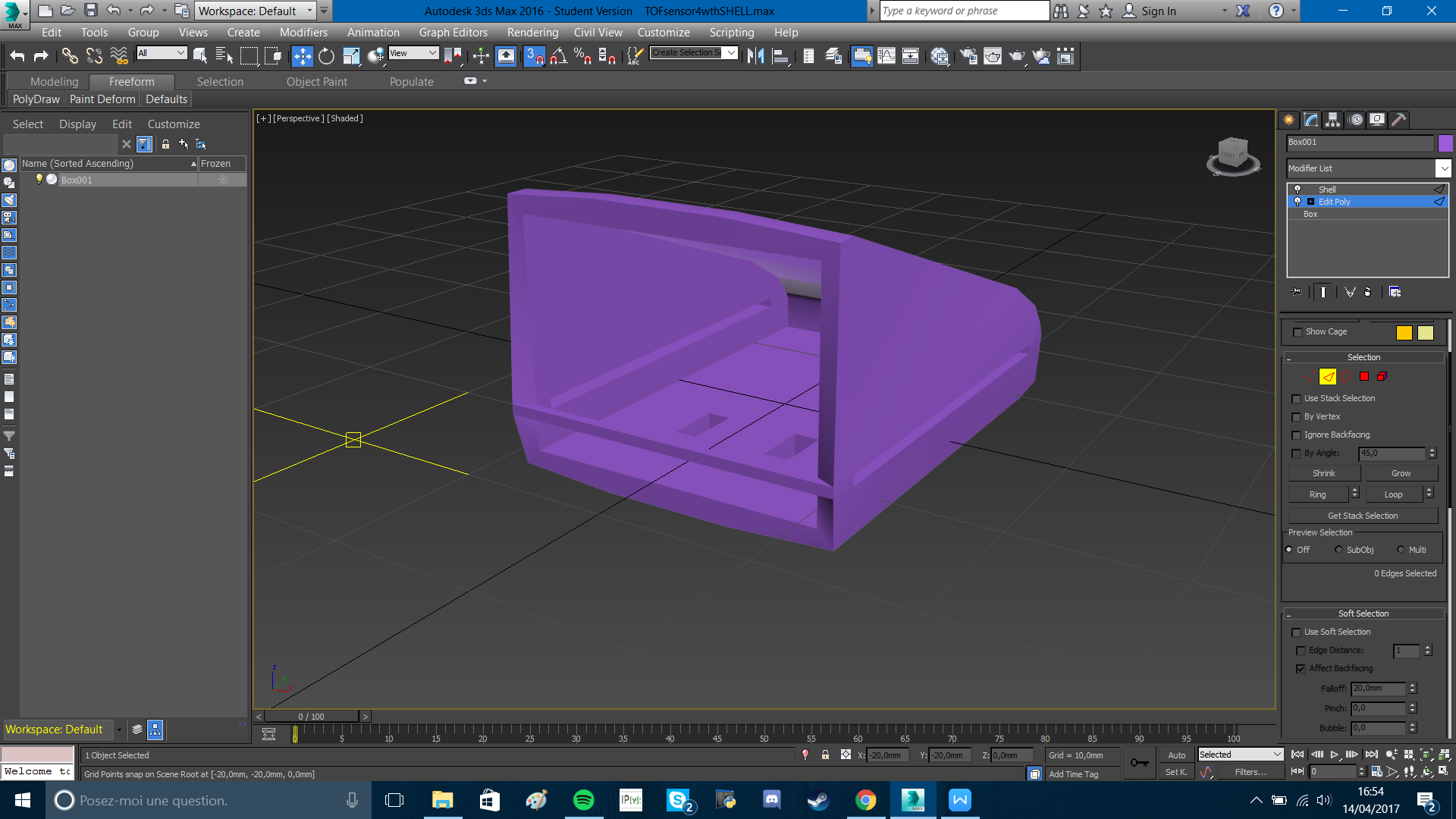
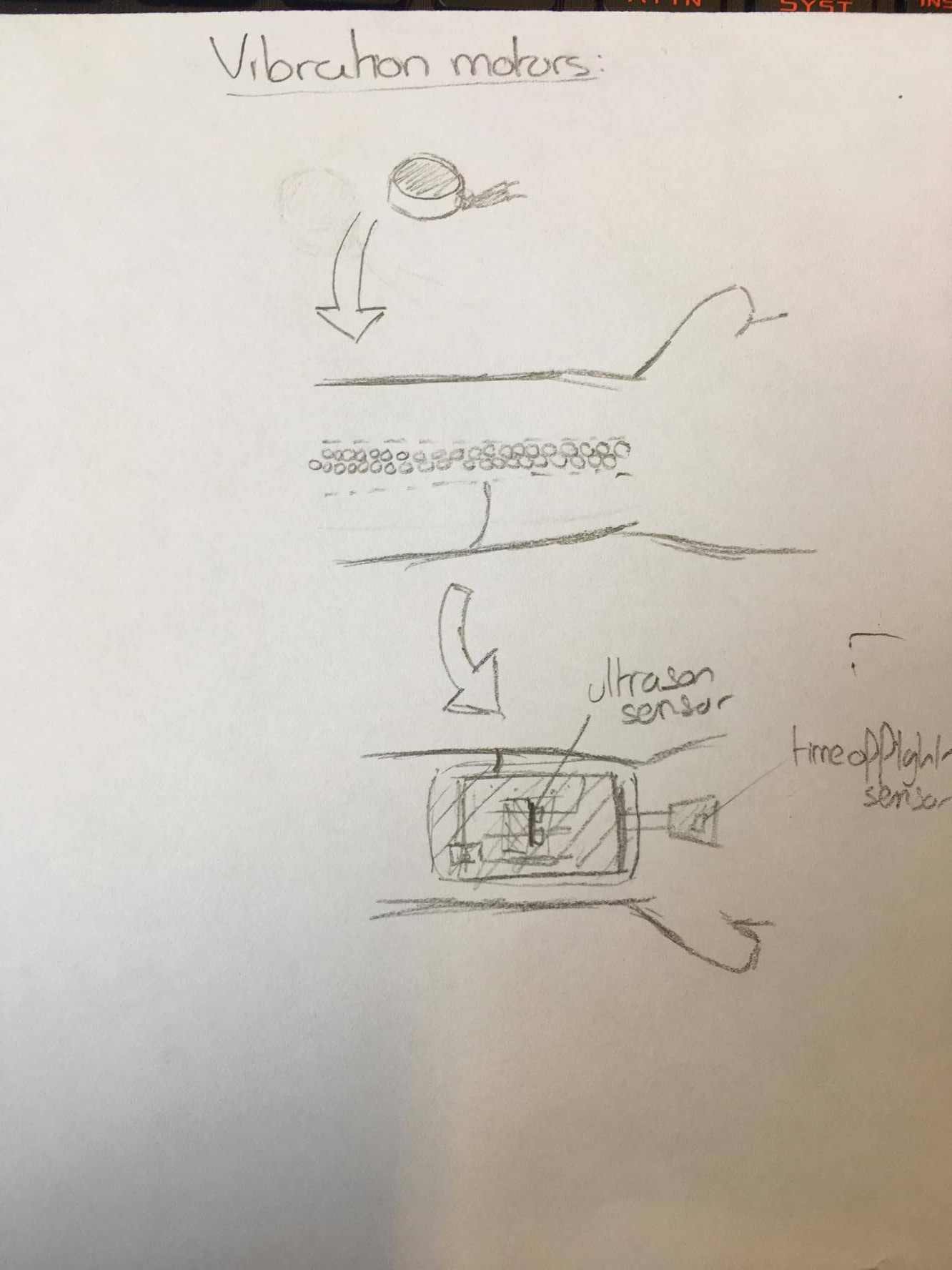
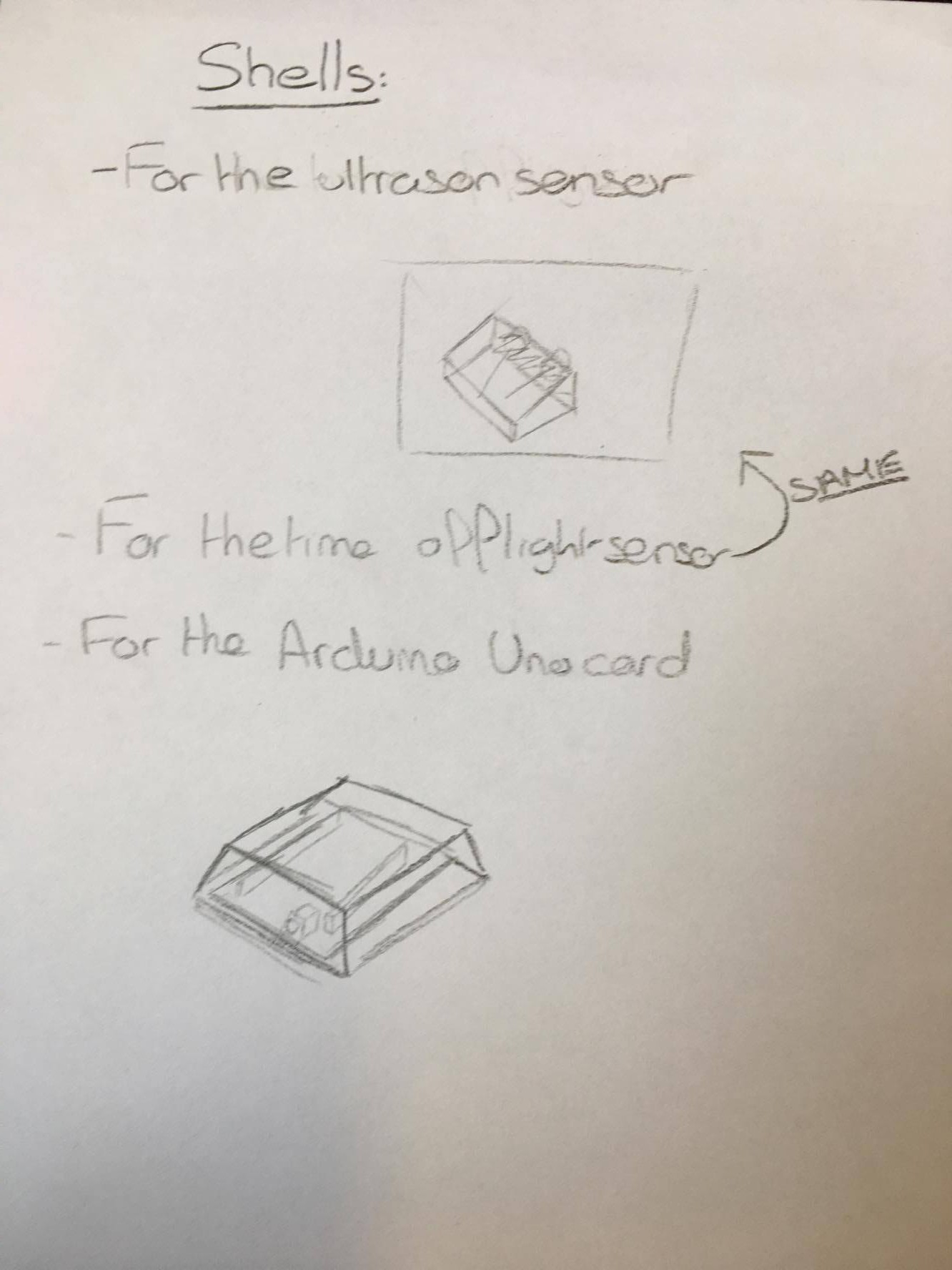
The Sonar Blind Project tends to replace the blind mans canes with a wristband that works with sonar concept.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
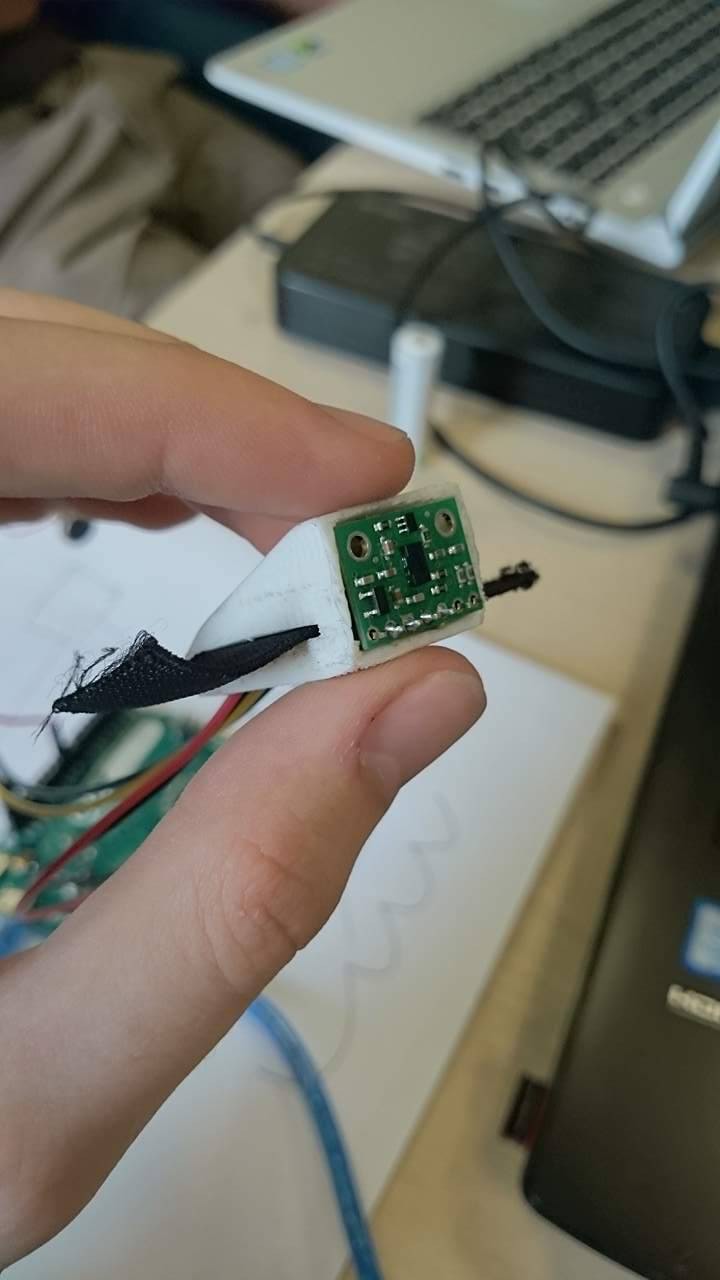
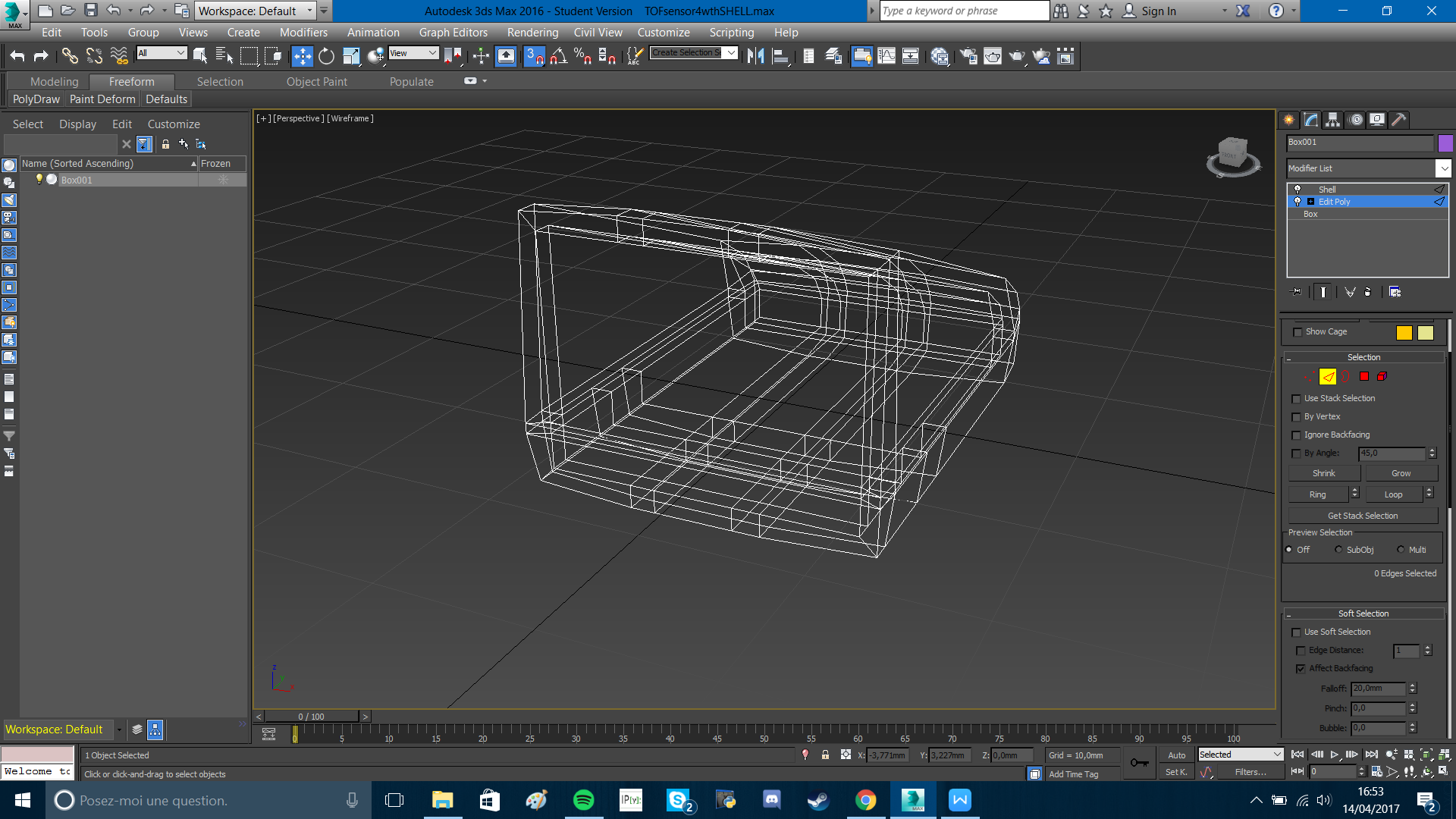
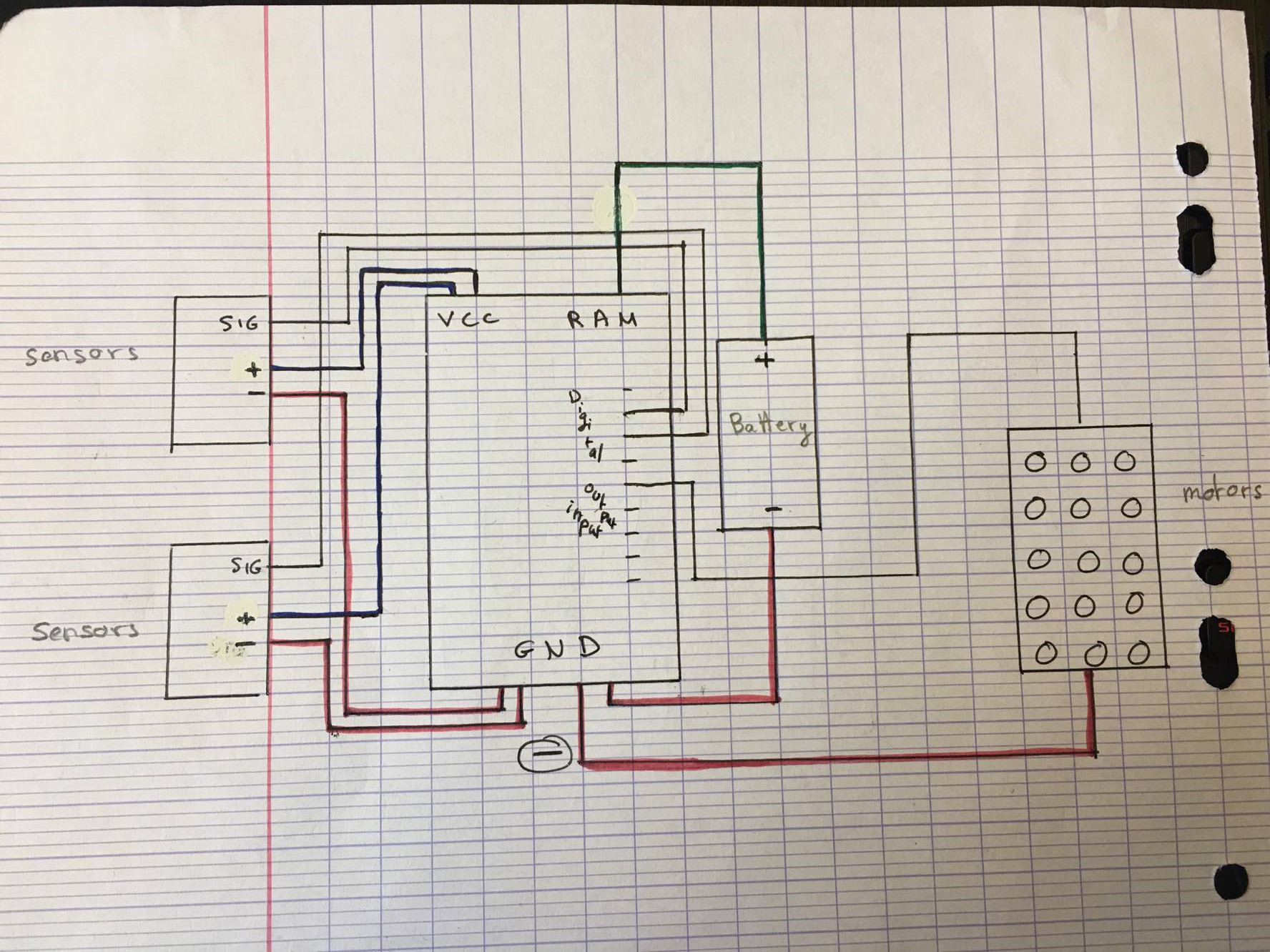
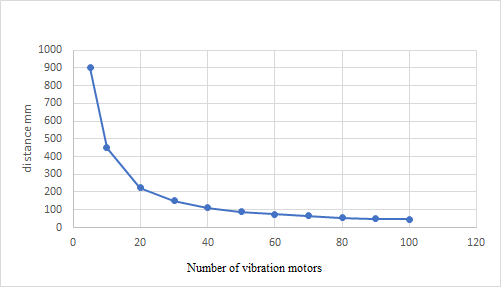
 We made a few research about how we are going to make our device, and we have a new component, an arduino multiplexer, that is going to allow us to plug up to 50 (64 exactly) vibration motors, and we are going to need that so the device can be really be accurate.
We made a few research about how we are going to make our device, and we have a new component, an arduino multiplexer, that is going to allow us to plug up to 50 (64 exactly) vibration motors, and we are going to need that so the device can be really be accurate.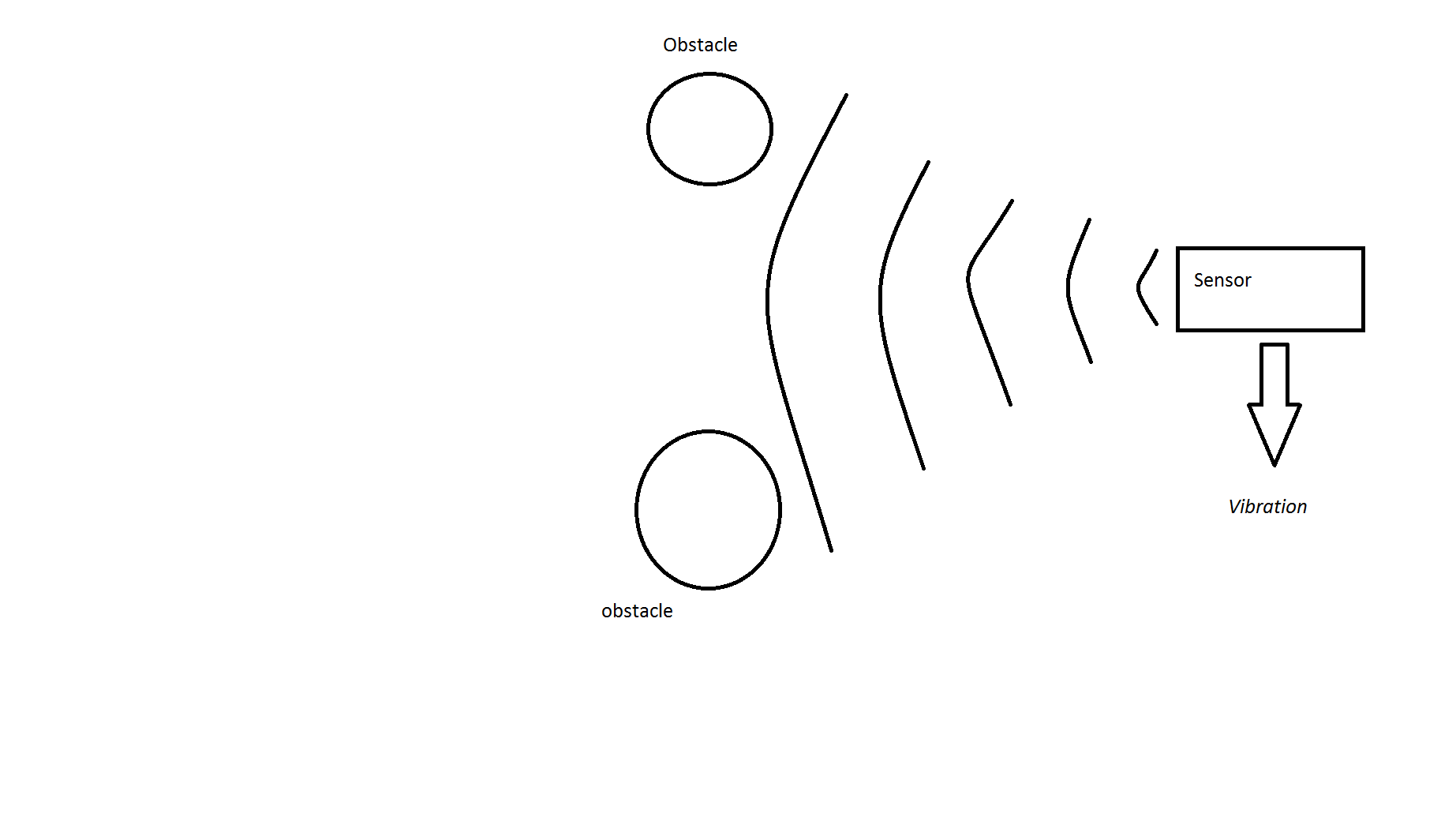

 PAM
PAM
 mircemk
mircemk
 Krishna Mohan
Krishna Mohan