 Thomas
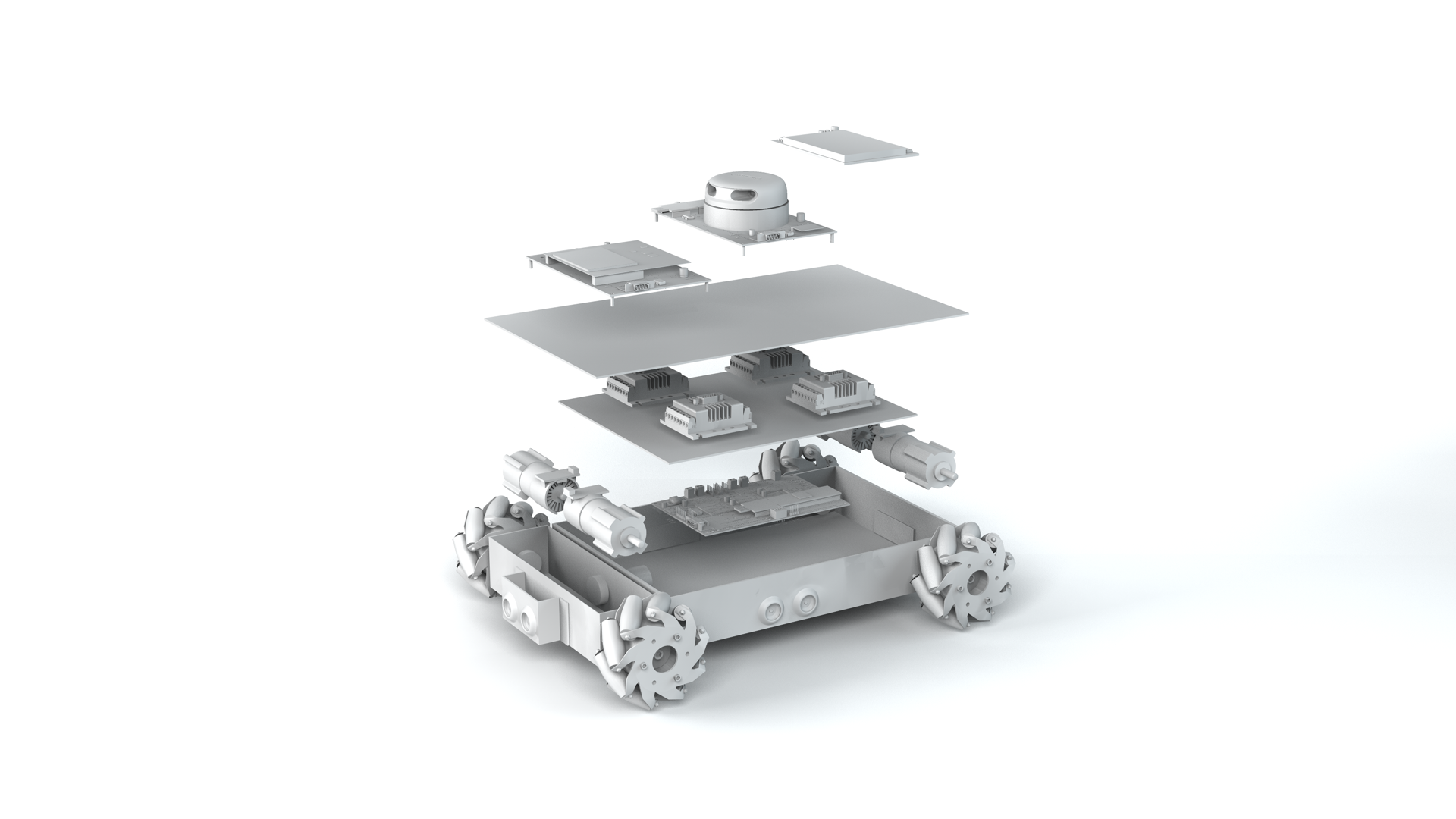
ThomasThe StudentCar is build in a modular way.
The base is a mecanum wheel robot by NEXUS. Each wheel is driven by a own motor, where each motor has an own motor-controller (Faulhaber MCDC) and is equipped with encoders.
The power supply is provided by the SmartPower Module, which has outputs for the ECU, Motors, 5V and 3.3V. All the outputs are controllable and monitored for voltage and current. The SmartPower Module is part of an advanced error escalation and safety system.
The ECU is an Infineon AURIX G1 multicore microcontroller.
The LiDAR Module is equipped with a RPLIDAR A2, which is scanning the environment of the car for obstacles. The LiDAR Module is part of the safety logic, which prevents the car from hitting obstacles.
There is a SmartCommunication module under development, which will provide connectivity for application as well as for diagnostic data. Currently we evaluate an ESP32.
Update!
 Åke Hedman
Åke Hedman
 Electroniclovers123
Electroniclovers123
 jasonwinfieldnz
jasonwinfieldnz