 cjh
cjhSolar panel 5 amps at 12 V.
Max depth 200 feet
Entry Video
A solar powered autonomous submarine that explores and measures the ocean at night, and posts the results to Twitter and Facebook by day.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Solar panel 5 amps at 12 V.
Max depth 200 feet
Entry Video
I have discovered a few problems with the MDM board. 1. Missing pull up on tx out pin on the rs485 driver. I discovered that when the ~re (receive enable) pin on the 485 driver goes high, the tx out pin goes low. This high to low transition will appear as a start bit and cause a character interrupt on the xmega. By pulling up th tx out pin the line will stay high when the receiver is turned off. 2. The chip select lines for all six motor drivers are connected together but are not connected to the xmega.
I finally got around to building up the MDM board. I populated 1 motor driver IC and the rs485 driver. I had a problem where the package I used from Kicad for my Atxmega was too small so I had to create another Atxmega break out PCB and wire that to the original MDM board. Long story short I have lab view on the PC sending messages via rs485 to the xmega which is driving PWM to the motor driver that drives the motor with a propeller attached. The motor draw less than an amp at full speed when unloaded and about 3 amps when submerged in water.
I got the MDM PCB from OSH Park a couple of weeks ago. I started to assembly the board tonight, but I relized that the ATXMEGA128D3 was too large for the footprint I had put on the board. I selected the TQFP64 footprint from Kicad, but didn't verify the dimensions against the data sheet.
This diagram shows the ArduSub connected to the Internet, on-board electronics, sensors and thrusters.
https://github.com/HoferTech/ArduSub_Docs/blob/master/Docs/system_diagram.pdf?raw=true
Uploaded entry video. It was very hard to describe all the details I wanted in two minutes. I did manage to show the board from KiCAD 3D viewer in luie of waiting for my board to ship.
MDM pcb is on its way should be here on Monday. Working on code, I wanted to demo board for my entry video but I don't think I will have enough time.
Working on this document, describes the messages that go from one board to another. Will post soon.
I ordered the MDM PCB from OSH Park 3 copies of the MDM for $80.15.
Added MDM Gerbers

I mainly picked the MPU-9150, because I heard this is what is used on cast AR. I figured if the specs were good enough for head tracking they would be good enough for a submarine.
That's an amazing project! Can I ask you what are your considerations for choosing the MPU-9150? I'm doing an autonomous boat and I'm struggling to choose the right IMU :) https://hackaday.io/project/10652-green-powered-sailboat
I want to add a side scan sonar to this project. I think I could build it from ultrasonic cleaner transducers. I have also been thinking about adding a beagle bone black as the master controller. This will make video capture easier as I won't have to design a board for that.
Chris, thanks for your comments. I like your idea about the bouy it allows the ROV to constantly be in communication with the surface. This way I can stream video and other data. It also allows for a larger solar array.

I love this project. I've seen other hobbyist UUV (unmanned underwater vehicles). They used neutral buoyancy too. They used water pump jets for lateral navigation and for vertical power dives/ascents. When the jets stop the UUV naturally ascends slowly to it's natural buoyant point. You'd have to reverse vertical jets for powered ascent. Using jets versus screws (propellers) help from getting fouled in vegetation or coming into harmful contact with biologicals (i.e. fish, manatees, etc.)
Personally I would like to see this:
(1) Tethered line to a floating stationary sea-buoy. The buoy could have a sea-anchor or bottom-anchor. It could contain the solar cell array and send recharging power down to the UUV. It could have a self-retracting spool to prevent line-fouling. It could also contain the radio telemetry package and radiate at all times since it is not underwater. Also GPS package is top-side. The UUV would not need to navigate laterally underwater and could just stay in that column under the buoy. The buoy could also have strobe lights and safety flags.
(2) To assist in descent/ascent... take a clue for US Navy submarines. You could construct some sort of PVC tank that is balanced, large, and can handle seawater and compressed air. It would have a water pump attached to it and an air pump. To dive you'd turn on the water pump and effectively scuttling the UUV. You could monitor rate of descent with some sort of barometric sensor. Also water detection sensors at key vertical points in the tank tell you how much ballast you've taken on. Conversely a compressed air pump could push the seawater out through a electronically controlled one-way valve (a/k/a blowing ballast). You will see a lot of bubbles during ascent. However, there is a weird effect that may or may not occur, ice crystals around the compressor air nozzle. You may need a electronic Peltier Effect element to provide heat to melt any ice build up. If you're concerned with the vessels horizontal attitude (a/k/a down-bubble) or trim during descent you could use Hg switches to monitor horizontal level. However, you need more than one ballast tank to compensate for trim. But if your ballast tank is perfectly balanced in the center of the UUV then this might not be an issue.
(3) Emergency acoustic pinger is a good idea but it is difficult to pinpoint location without sophisticated passive-systems (and JW Fisher 12 khz pingers are about $95 but others go into the thousands). Also you have to regulate the decibels to prevent biological hearing damage (i.e. whales and dolphins). You also need to add a up-pointing blue/green LED flasher. Putting a bulls-eye pattern on top of the UUV will aid in seeing the UUV from the surface if the waters are not too turbid. Unfortunately you may need to invest into a grapple hook for sea rescue of your UUV if the tether breaks or you don't use one at all.
(4) At 200' (61 m) of seawater your PSI is about 104 psi. If you want a good resealable end-caps for your PVC you should use Oatey Test Plugs (available at Lowes and Home Depot in USA) . But moisture could still be introduced to you interior via inner-wall condensation. Not sure how to combat that without interior temperature regulation which would make your costs prohibitive. Oatey test plugs are not rated for 104 psi. But the sea pressure will be pushing in on them rather than out. They can withstand 17 psi head pressure (pushing out). Remember everything will get tighter at depth and reverse that on ascent. Make sure all equipment is rated to withstand 104 psi from all sides for 200' depths. A under-rated ballast tank could implode at submerged depth and could explode if air pressure is too high during ascent. So the tank should be over-spec (i.e. MilSpec). If you add cameras they may need special water-tight and pressurized containers at depth. Unless you're buying underwater rated cameras.
eot
SOTB (a/k/a Chris)



 bobricius
bobricius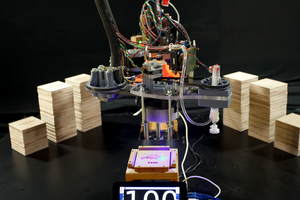
 anfroholic
anfroholic
 Taylor Schweizer
Taylor Schweizer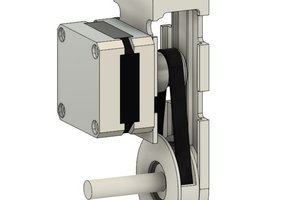
Amazing! I like this one, I think I saw this used in a movie.
- Reine, https://pittsburghlandsurveyors.com/