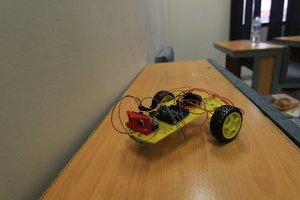
The aim of the Embedded Systems Project was to create a buggy programmed to follow a white line along a black track. The group did not see the track before the actual race however we were told to be prepared for S-bends, pinch points, ramps, and gaps in the white line of up to 2mm. We also had to program the buggy to turn around at the end of the track and repeat the course backwards. We had the whole of our second year to complete the project with the first semester focusing on the designing and planning of the project and the second semester focusing on the building, programming and testing of the buggy.
0%
0%
Embedded Systems Project
Design, Construct and Program a Line Following Robot
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Koppendorfer
Koppendorfer
 Leandro
Leandro