 alexw
alexwI realised that the production of PCBs will take a couple of weeks, so I have prioritised the redesign of the PCBs over the last few days. This version of the PCB is designed to work in conjunction with the Fathom-S tether interface from Blue Robotics. The control board uses the serial output from the Fathom-S to program the control board and allows for remote communication. The Fathom-S board provides a serial port connection over a tether length of 600+ metres, compared to the glider's current 5 metre limit (USB communication limit). Additionally, the control board passes through the battery supply to the Fathom-S so that the control board uses the 5V supply that the Fathom-S board produces with its 7805 regulator. Programming the control board via the Fathom-S interface requires a dedicated serial port, so in order to use another serial device (compass or dissolved oxygen sensor) more dedicated serial ports are required. Therefore I am now using an ATMEGA2560 as opposed to the ATMEGA328P, providing up to 4 UART connections (and much more flash memory; 256kB compared to 32kB). Other changes include a dedicated 16MHz crystal and using the MPU6050 breakout board as opposed to the LSM9DS0 (Still out of stock until November).
Although this control board can be used as a standalone autopilot, with the MPU6050 and external pressure sensor/compass/GPS, the board can also be used as a slave board for an external autopilot (such as Pixhawk). To allow this, there is a set of header pins towards the left of the board for analog inputs/digital outputs. The control board reads PWM signals through the analog pins from the external autopilot and converts the signal into absolute positions for the motors.
Although I am aware that KiCad is more open-source and is completely free (no paid for features, therefore more accessible), I have decided to stick with Eagle. Given time restraints, it is practical for me to continue using a program I am familiar with. (Onshape was quick to pick up as it is very similar to Solidworks)
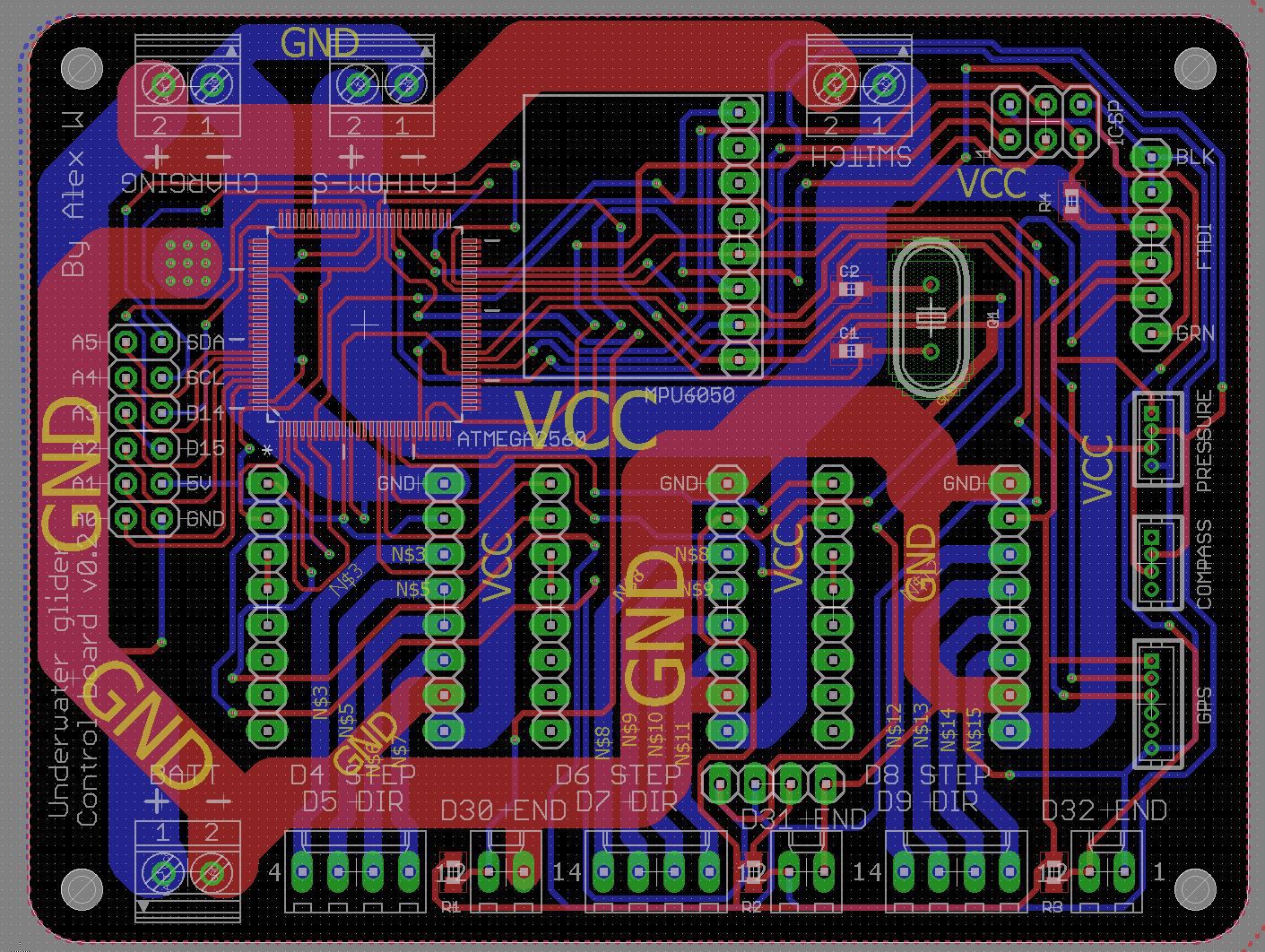
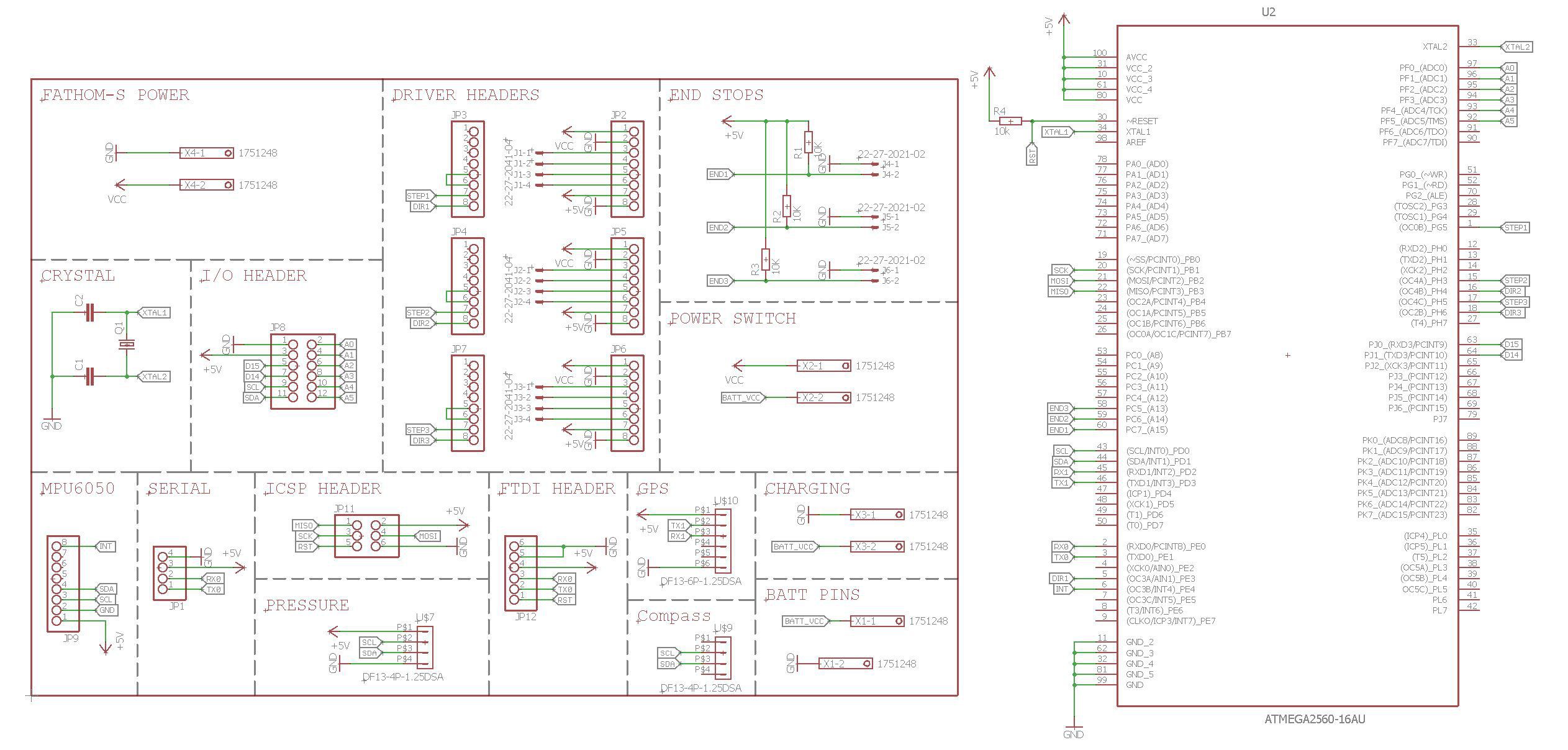
Images of the schematic and board are below and you can download the Eagle design files from the Dropbox development folder (Glider_PCBs/Control_board/v0.2). I have ordered the control board from OSH Park with their Super Swift service and paid for postage to the UK so the boards should be here in about a weeks time.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Nice design!
Are you sure? yes | no