 alexw
alexwNow that the exam period is over I am able to start spending more time developing the glider. This is a quick update about the development over the last week or so.
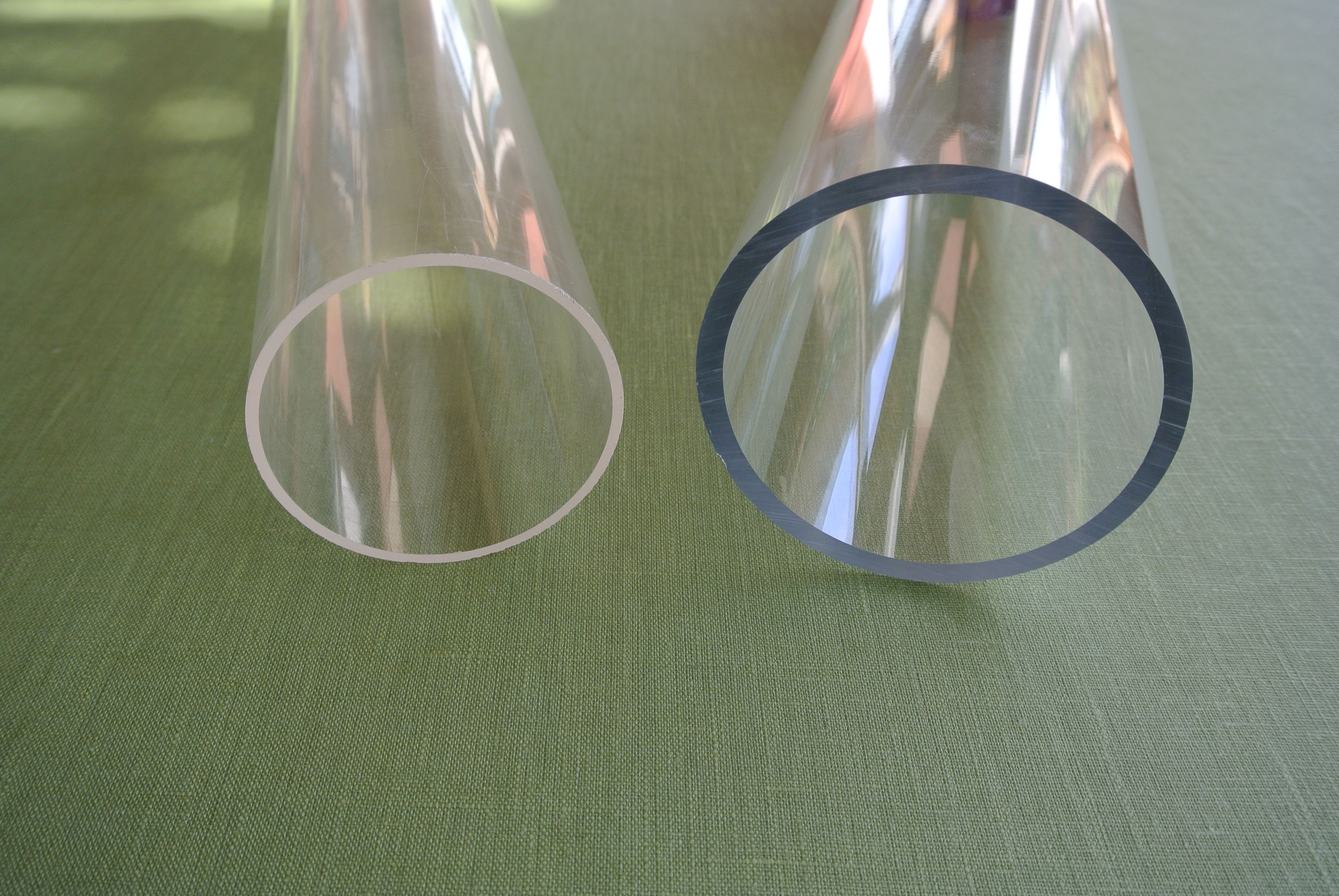
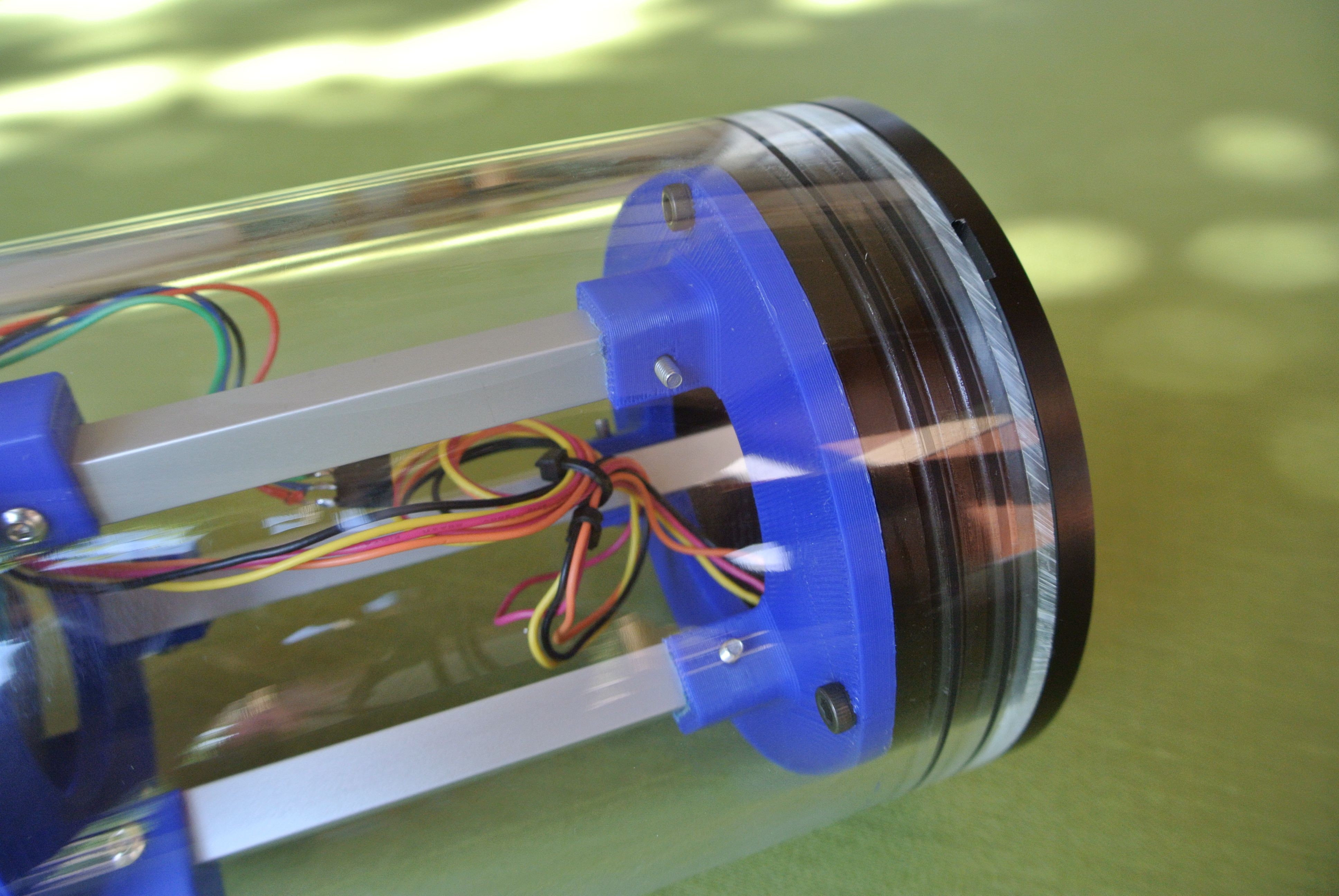
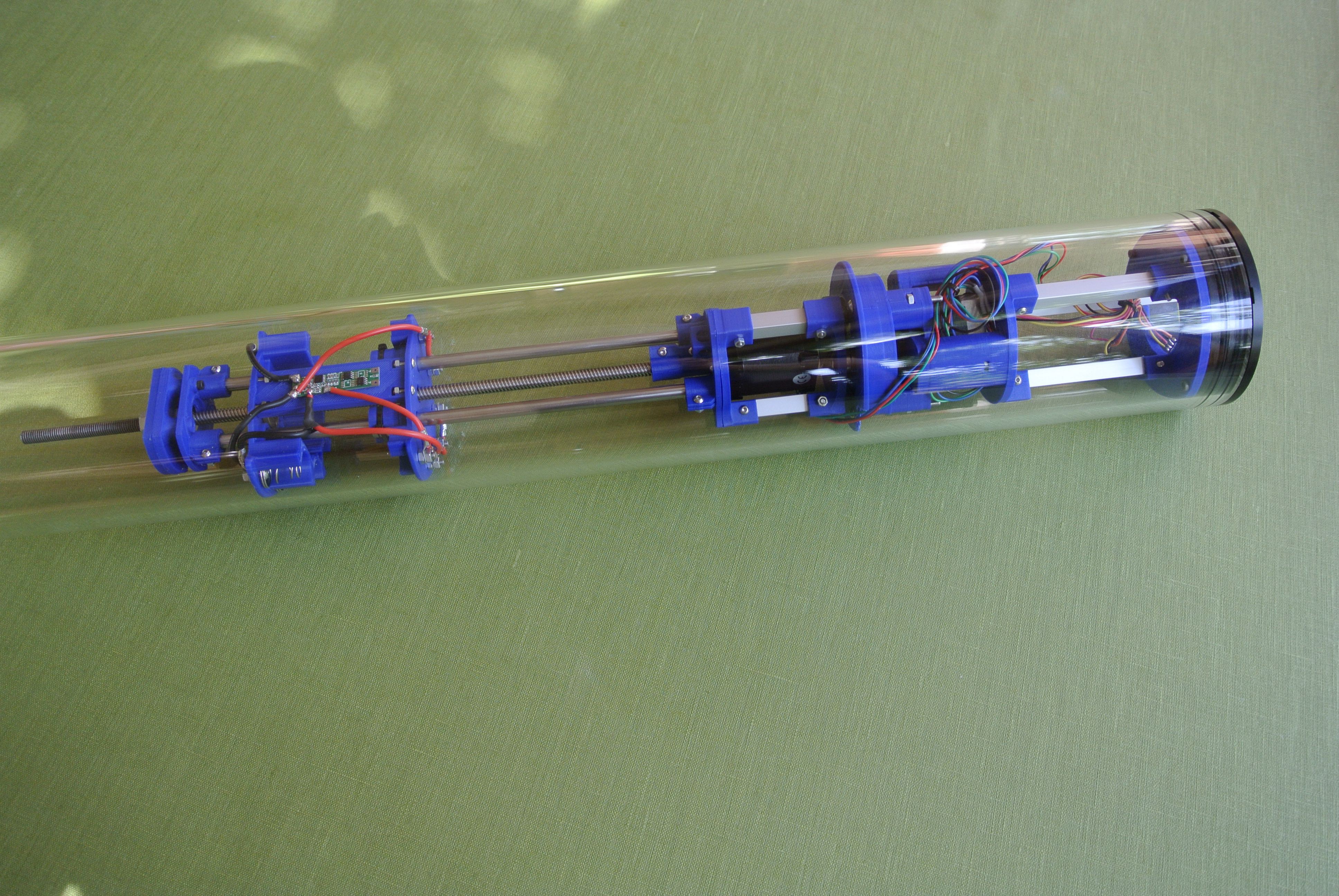
The Blue Robotics order arrived and the components are of a very high quality and a significant improvement over previous hardware. The new tubing has an internal diameter of 100mm, whereas the previous tubing had an internal diameter of 84mm. In order to produce a proof of concept quickly, I will use the internals designed for the smaller tubing and use spacers so that the internals do not move around within the new tubing. I have currently fitted the backend of the internals within the new tubing using spacers. Blue Robotics also produce endcaps which forms a watertight seal with their tubing and you can easily print components that bolt onto the endcaps.
I
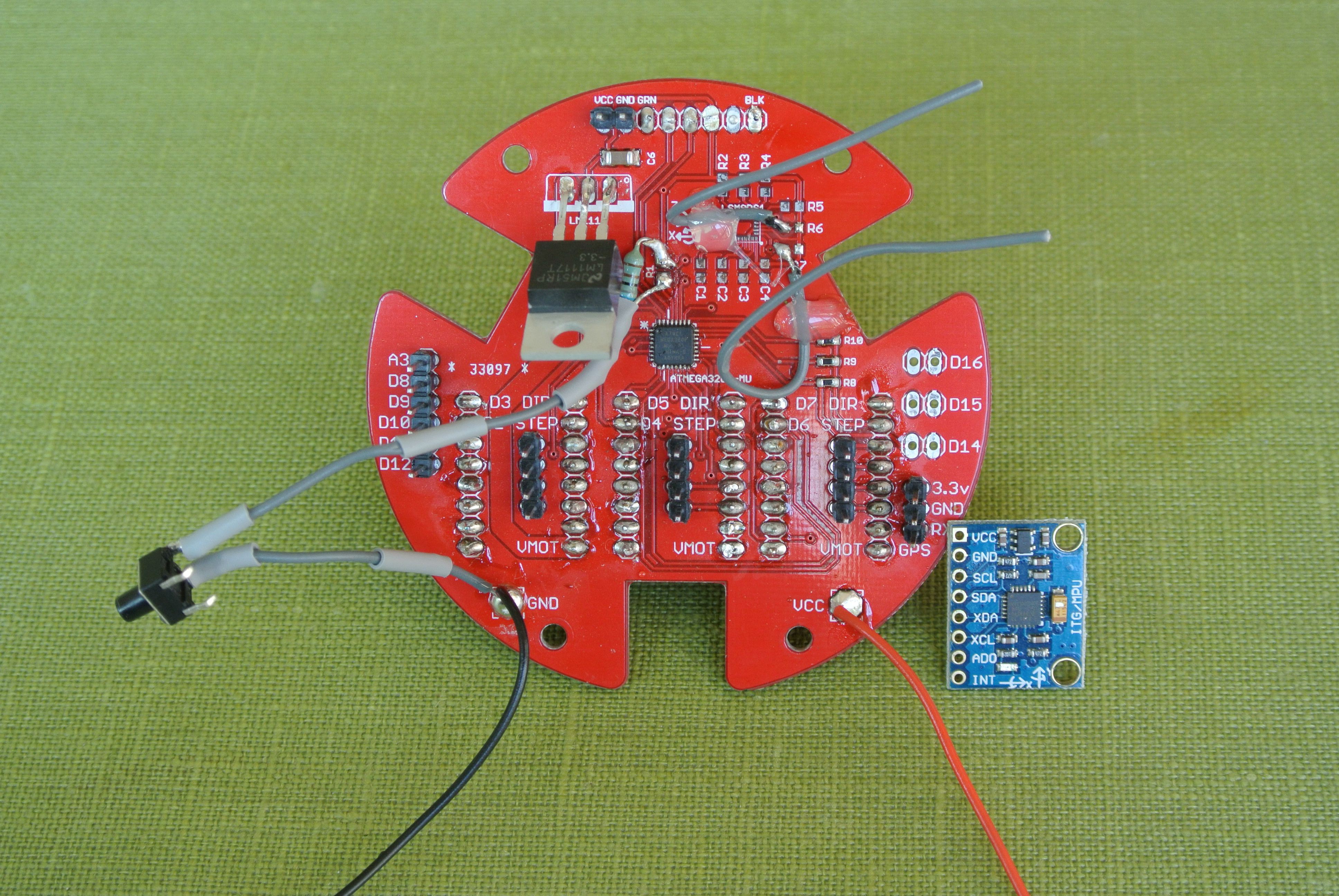
uploaded the arduino bootloader to the ATMEGA328P
so that it can now be programmed standalone and
was able to test the stepper motor drivers on the board and they
function perfectly. However, I
was unable to solder another board with the IMU
(LSM9DS1)
attached using
the hotplate method as
the pins were
too close together. I was going to order another IMU and solder it at
a hackerspace with a hot air soldering station, however the component
is out of stock until November. A workaround is using the
SDA
and SCL pads
on the PCB to attach another IMU (MPU6050).
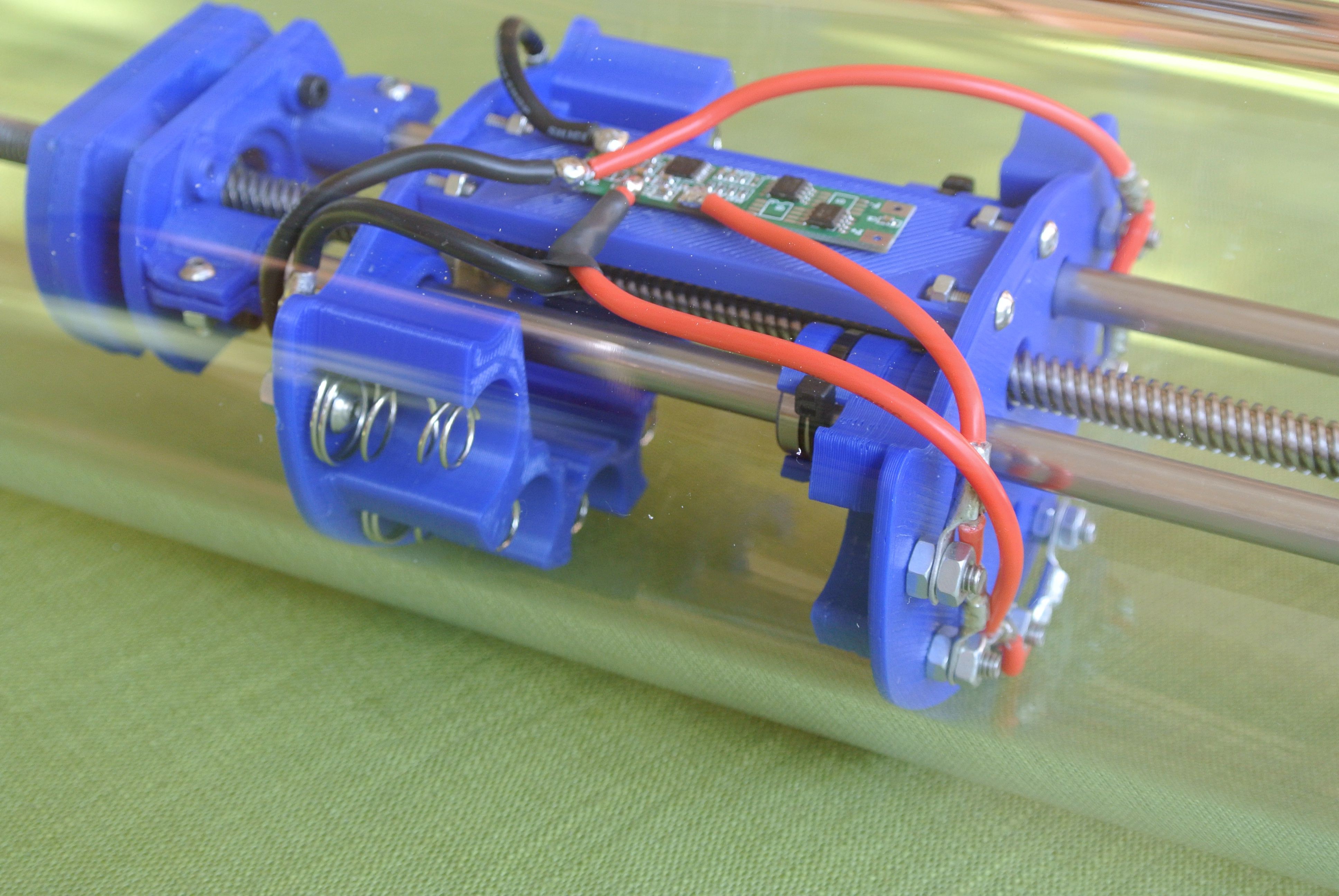
I
have
produced a battery holder for the lithium ion batteries using battery
spring contacts and printed
holders which snap the batteries into place. The batteries are
protected using a 3
cell protection circuit. This battery holder will also accommodate
steel rods on the underside to act as the movable mass which is used
to control roll and pitch.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Looks great! Hopefully we'll see it ballasting in the water soon after you move over all the compnents to the new tube.
Are you sure? yes | no