 alexw
alexwThe backend has been redesigned to be much more open for the new control board, and all the connectors are much more accessible. Also the control board has been lowered to allow for the integration of the Pixhawk 2.1 autopilot (the Cube took up too much vertical space previously). Most of the update to V3.1 has been completed but wiring still has to be completed.
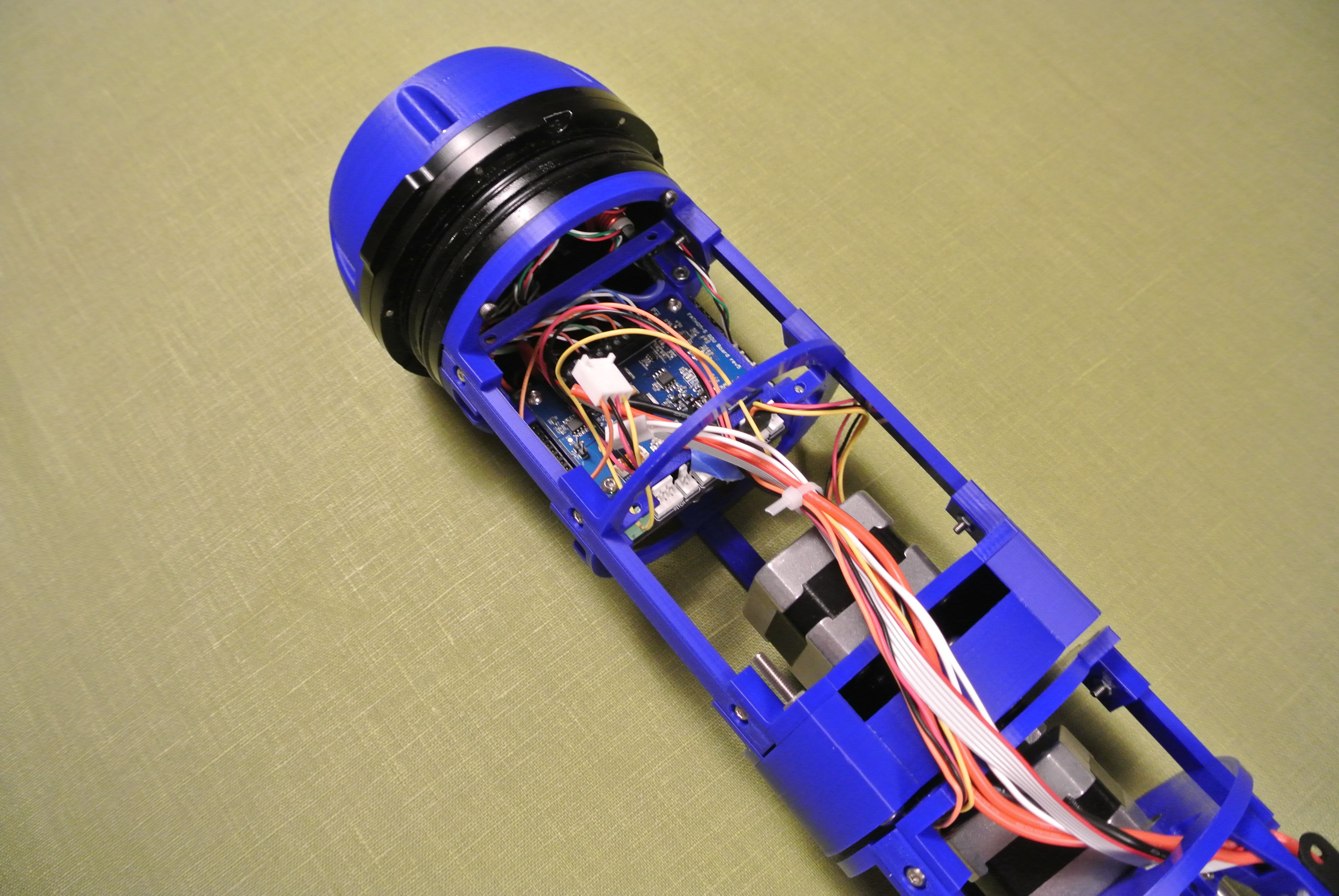
The planetary gearbox has also been thickened to reduce play, but the latest version printed with too much of a bond between gears so I plan on reprinting this on a FORM 2 printer as this will be able to achieve a much better tolerance. I also changed the position of wiring past the planetary gearbox; previously the wiring ran on the side of the gearbox, which limited rotation, however the wiring now passes over the top of the gearbox and rotatory limits are symmetrical.
Nothing noteworthy has occurred to the mass assembly, apart from the general thickening of printed pieces.
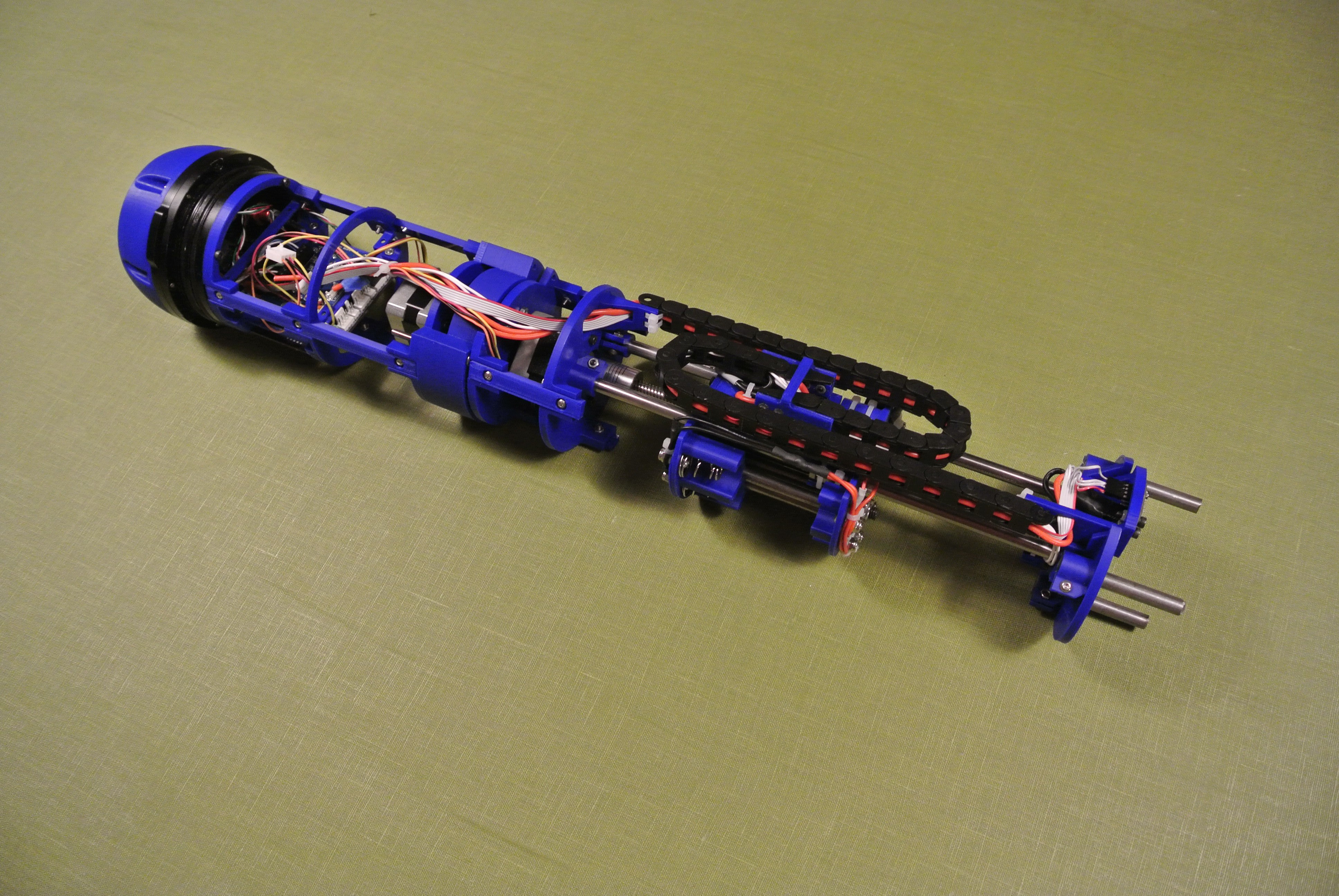
The
exterior components have been reprinted in 100% PLA and are not resin
coated (The prints previously failed with 100% infill and let in
water so had to be coated). However PLA still absorbed water –
reports are a ~5% weight increase over a period of 30 days submerged,
so I will look at printing the exterior components from PET-G.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.