 Jeremy Gilbert
Jeremy GilbertHot off the press are two new Makernet boards. This post will talk about GM1200, a rotary encoder module.
Firmware for my boards is still in a very early state but a lot is working. Each module participates on the Makernet bus and performs some input or output function for the user's project. Each peripheral runs controlling firmware on a 48Mhrz ARM processor that supports network arbitration, addressing, broadcasting, event polling, and imperative commands. The event architecture reduces the need for polling - only devices with new information to share to the MCU raise their hand to send events. The ARM is internally clocked and doesn't need an external crystal.
I've decided to give each module a product number to help me look them up quickly in my notes and identify hardware versions.
GM1200 - Rotary Encoder 1.0
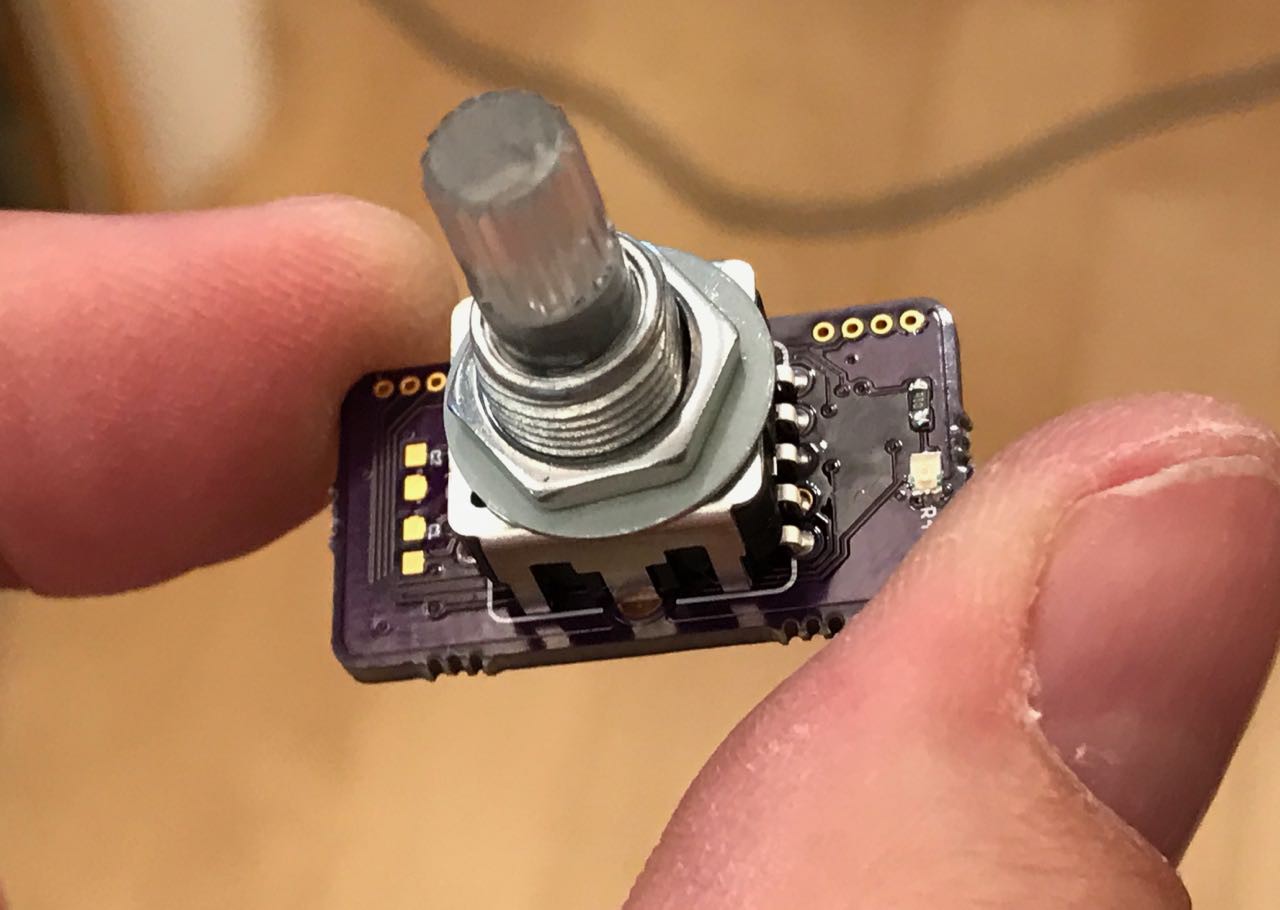
Every project needs a rotary encoder - not only are they fun to twiddle, but they are great for menu navigation, setting values and all sorts of other useful things. This module drives a single rotary encoder which includes a pushbutton switch and a RGB LED. It also sports a small activity LED on the side to tell you if the module is working. Attractive, don't you think?

The backside supports two Makernet ports, so the knob can be daisy chained with other peripherals. Everything is controlled with a 48Mhrz Atmel SAMD11 ARM chip running at 48Mhrz. The LEDs can be PWM'ed to any desired brightness. The chip uses interrupts to process grey code from the rotary encoder to reduce the chance that steps are missed.
The initial batch of these worked nearly out of the box, however, there are a few planned improvements. First, I want to standardize on a 0804 LED indicator. Secondly, I neglected to put in I2C pull-ups, which I think are probably essential. There is an empty space for a clock and capacitors that ended up not being required once I got the clock-less configuration working. Finally, I haven't made a firm decision if the rotary encoder actually needs debouncing capacitors so those spots are un
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thanks!
Are you sure? yes | no
Nice design! That looks very useful!
Are you sure? yes | no