 Peter McCloud
Peter McCloudOne of the driving parameters for a variable pitch rotor is the torque required to actuate the blades. The servo size required directly translates to the torque required to maintain the blade position. As part of the #Inexpensive Composite Propellers/Rotors project, I recently covered the RC series of airfoils which are specifically designed for rotorcraft. This airfoils were specifically designed to have low pitching moments.
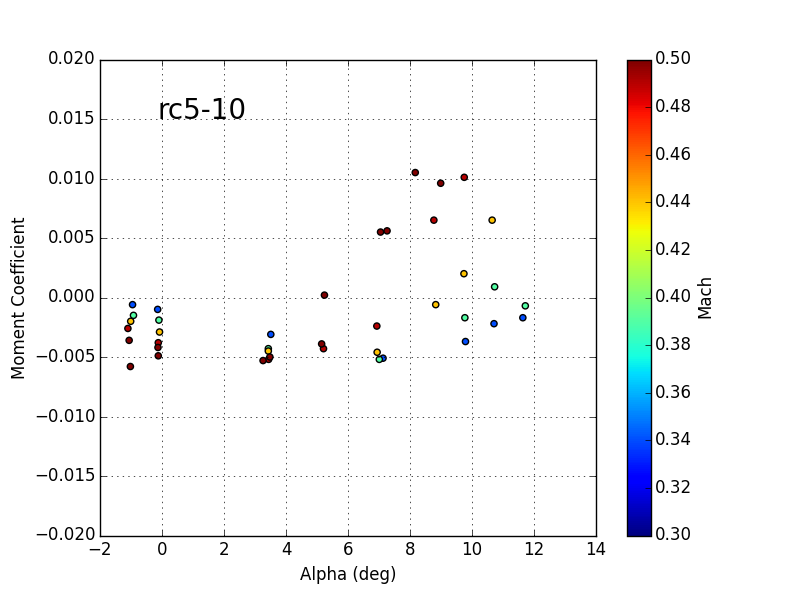
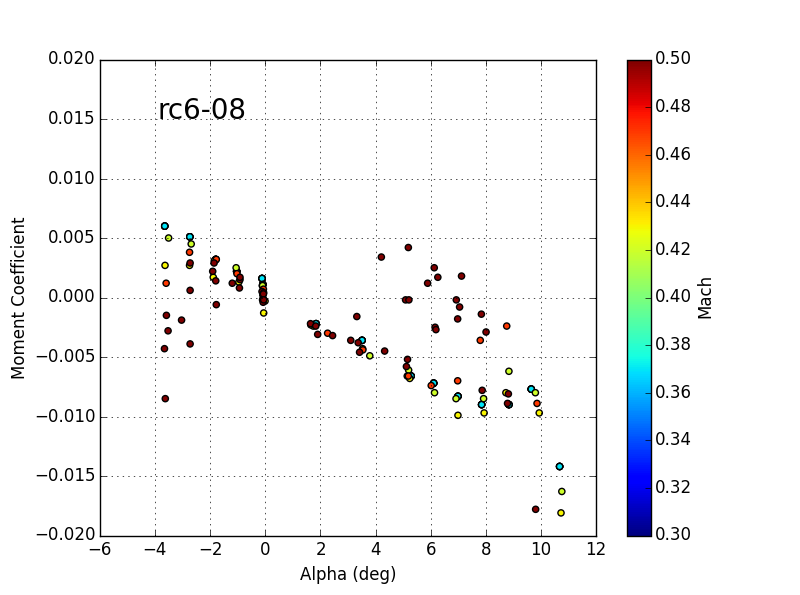
How low? The two plots below show the moment coefficients for the rc5-10, designed for inboard rotor section and the rc6-08, designed for rotor tips. For the region of interest the moments coefficients are within +/- 0.005. Comparing this to the NACA 2412, which was the airfoil used previously, the pitching moment is 5-10 times greater in magnitude for comparable angles of attack.
The shape of the blades for the EVPR will be identical the 3rd generation rotors currently being built for #Inexpensive Composite Propellers/Rotors minus the hub.
The overall blade torque required at maximum thrust was calculated. The per blade torque requirement ends up being 1.52 N-m or 1.12 ft-lbs. However the hobby servo world works in kg-cm, so the requirement is 15.5 kg-cm. However, the travel required to go from zero thrust to full thrust for the rotor blades is much less than the full travel for a servo. The gearing ratio is TBD, but a factor of 2-3 is likely, so the servo torque needs to be greater than 5-8 kg-cm.
The initial servo chosen was the Tower Pro MG996R. They were chosen because they were what I have on hand, but they have sufficient torque (10 kg-cm) and they are fairly light (55 g)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.