 Peter McCloud
Peter McCloudAfter completing the flight controller setup, it was time to test the rotor with the Pixhawk actively controlling the rotor surfaces. The rotor was activated, check-out and then the gas engine was turned on. Everything appeared to work well, but when the engine was turned off, it was found that one of the rotor blades had partially slipped out of place.
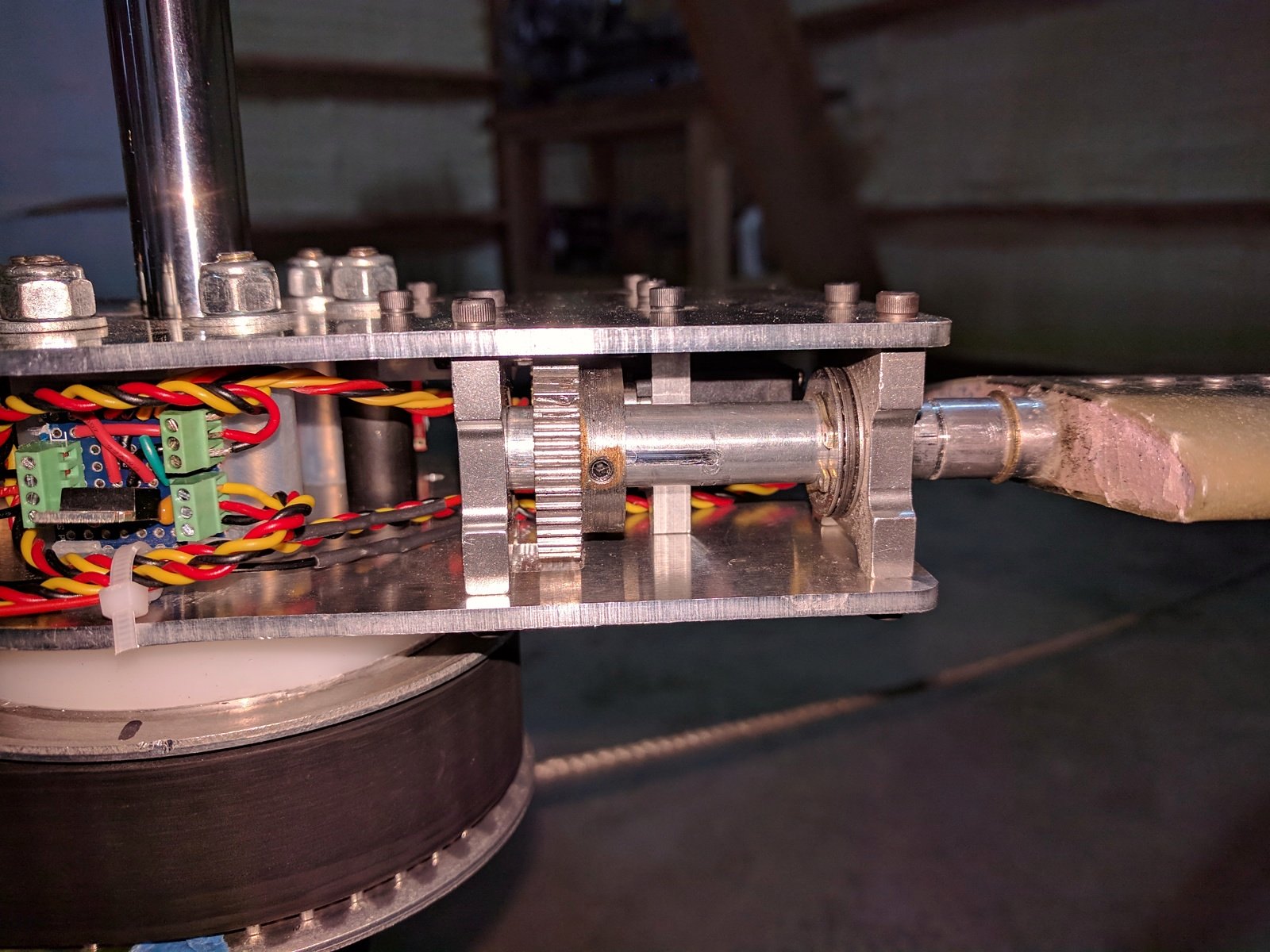
Fortunately, there was an extra groove in the axle shaft that caught the retaining ring when it slipped out, keeping the rotor blade from flying out. The grooves were found to be a little shallow, so they were machined slightly deeper. Additionally the retaining rings did seem to close as tight as they should, so new retaining rings were used. There was also some stripped internal servo gears, so the servo was replaced as well. At the time I was thinking that the blade slipping might have jammed the axle gear in place and that caused the gears to stripped.
A second test was conducted and the other rotor blade popped partially out and the brand new servo on the side that stayed in place had stripped internal gears. So it doesn't seem to be the rotor blade failures that are causing the stripped gears, but the normal environments.

The rotor blades popping out, should be relatively easy to the fix. There are heavy duty retaining rings that have a higher holding force and I've already ordered those. The servos required a bit more thinking. The gears for the current servos are listed as "Metal", but they are made from aluminum and brass. It's obvious that either steel or titanium gears would be a better choice. However, servos with steel gears have higher torque, which isn't a bad thing, but draw more power.
The solution is to use brushless servos. The servos I selected are the Hitec 9475SH. It's got steel gears, 50% more torque, is almost twice as fast and draws 900 mA at stall torque vs. 2700 mA that the current servos require, which should push the battery life almost up to 30 mins. The downside of course is money. The new servos cost $99 instead of $40.
I thought that this failure was going to mean that I wouldn't have a working prototype in time for the Hackaday Prize deadline. However, the retaining rings will get here on the 17th and the servos will get here on the 19th. I should have the new retaining rings installed by the time the servos show up, and it should only take 20 mins to install the new servos. That'll give me about 36 hrs to test and update my video showing the working prototype.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.