 Patrick Van Oosterwijck
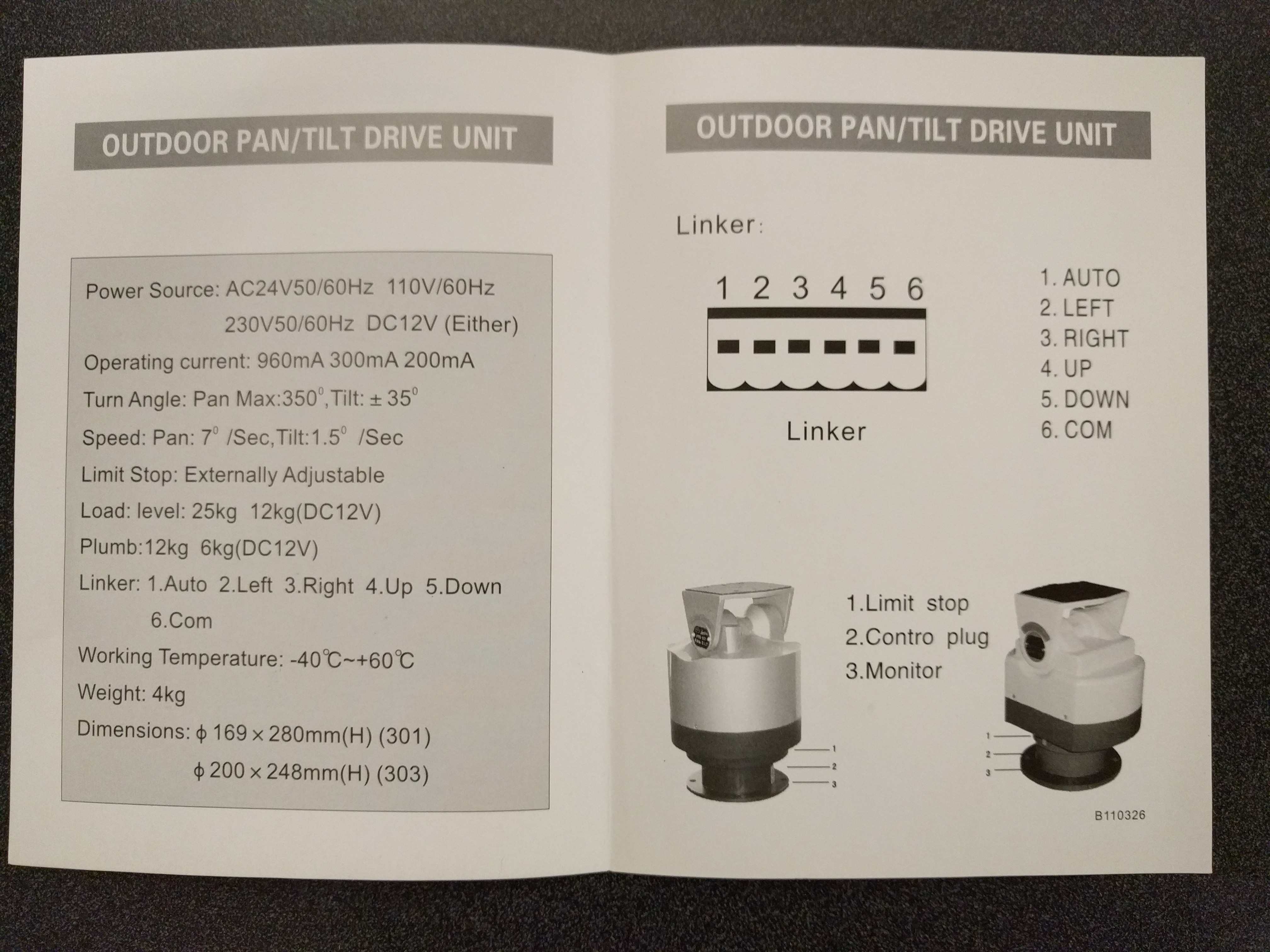
Patrick Van OosterwijckI decided to play with the pan/tilt stage, below is the little bit of info that came with the device:
Then I did some testing to see how it all behaves. At Tinkermill I have access to a nice isolated AC supply to do this:

I was surprised how quiet the unit is! I was curious what kind of motors were used. I have been wondering if it will be necessary to add some position feedback to the unit or if I can just drive it for a certain amount of time and expect a certain amount of travel that is consistent. So I decided to dissect it and see what is inside. Here are some shots after disassembly:
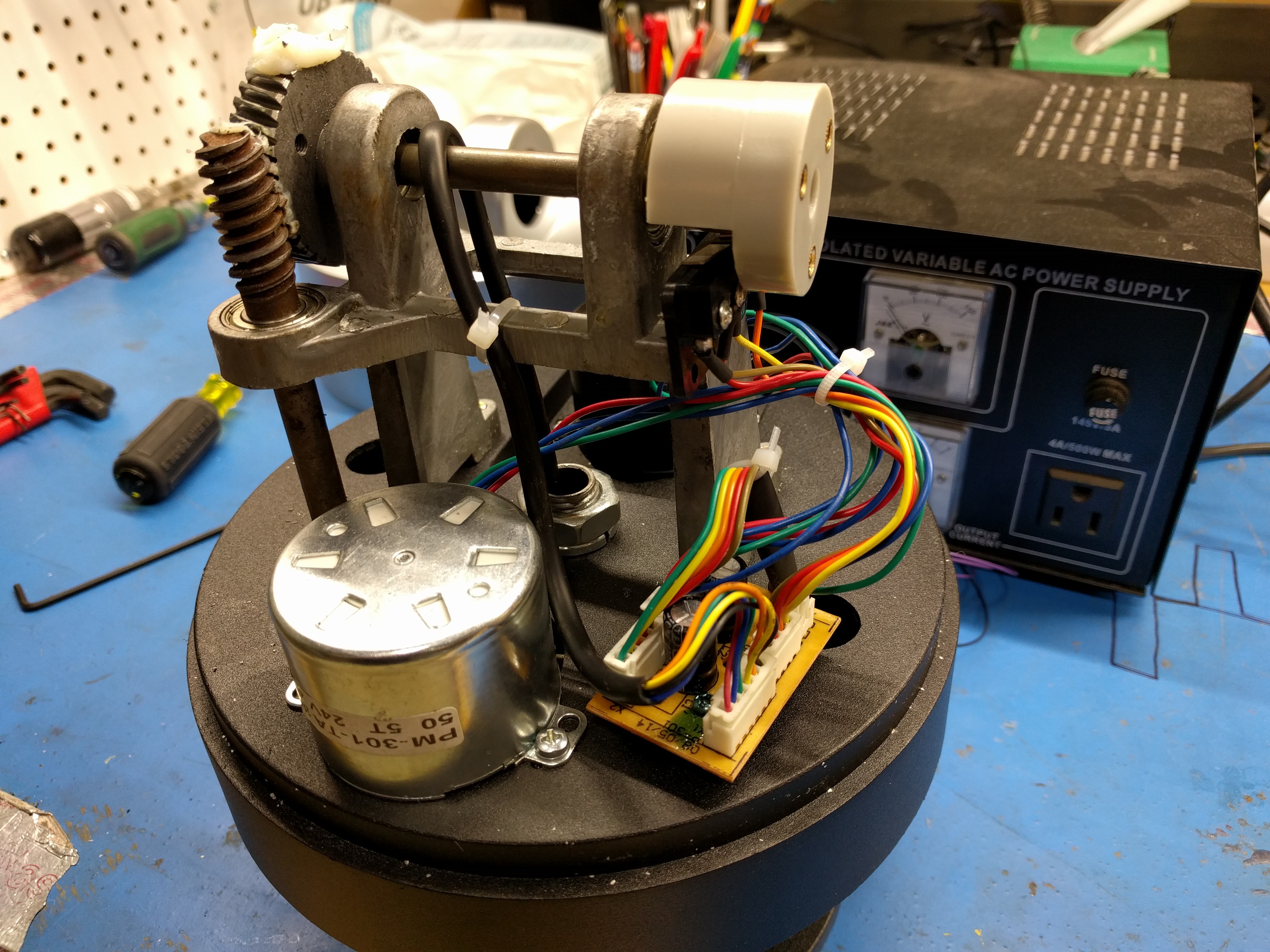

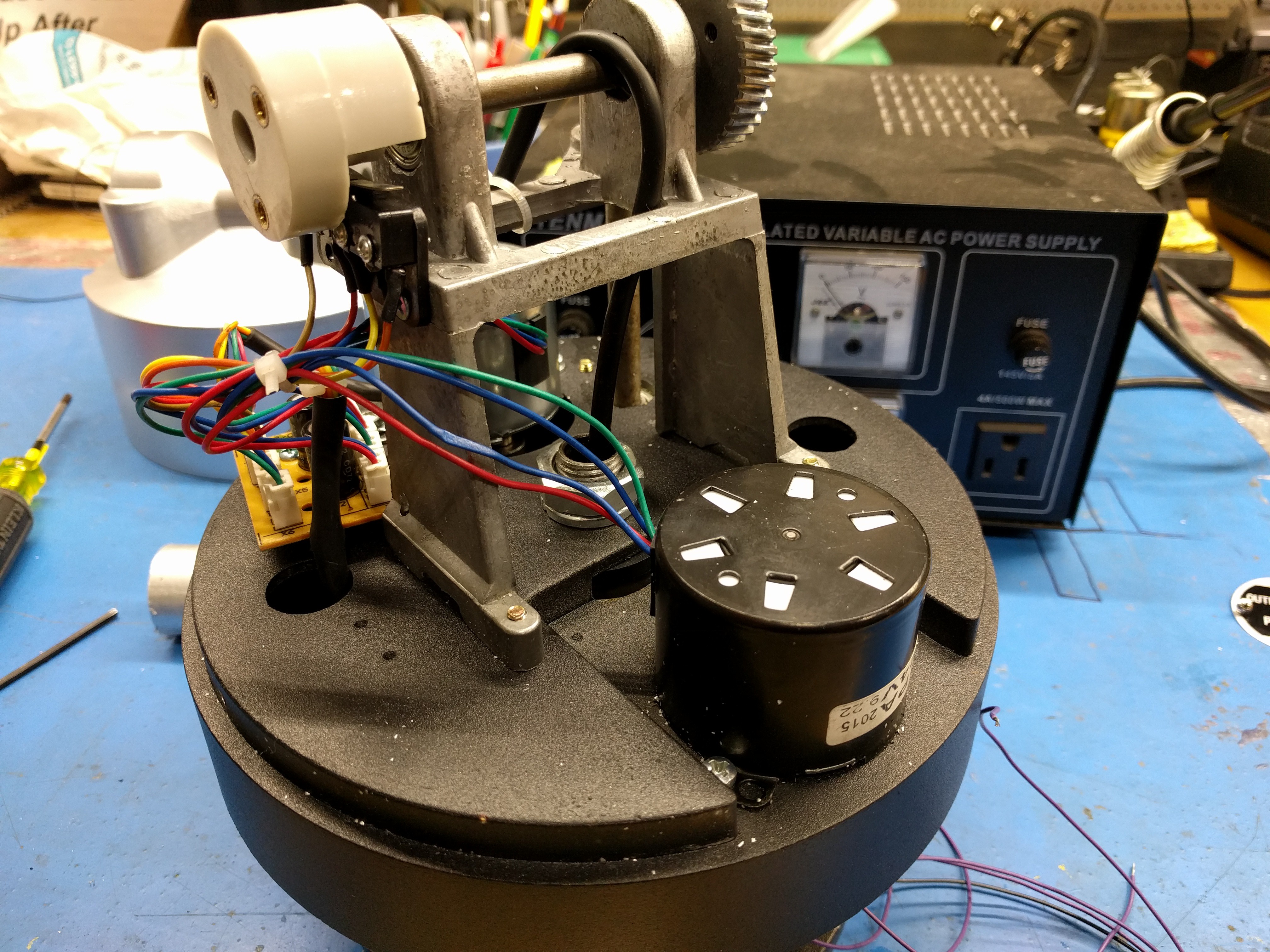
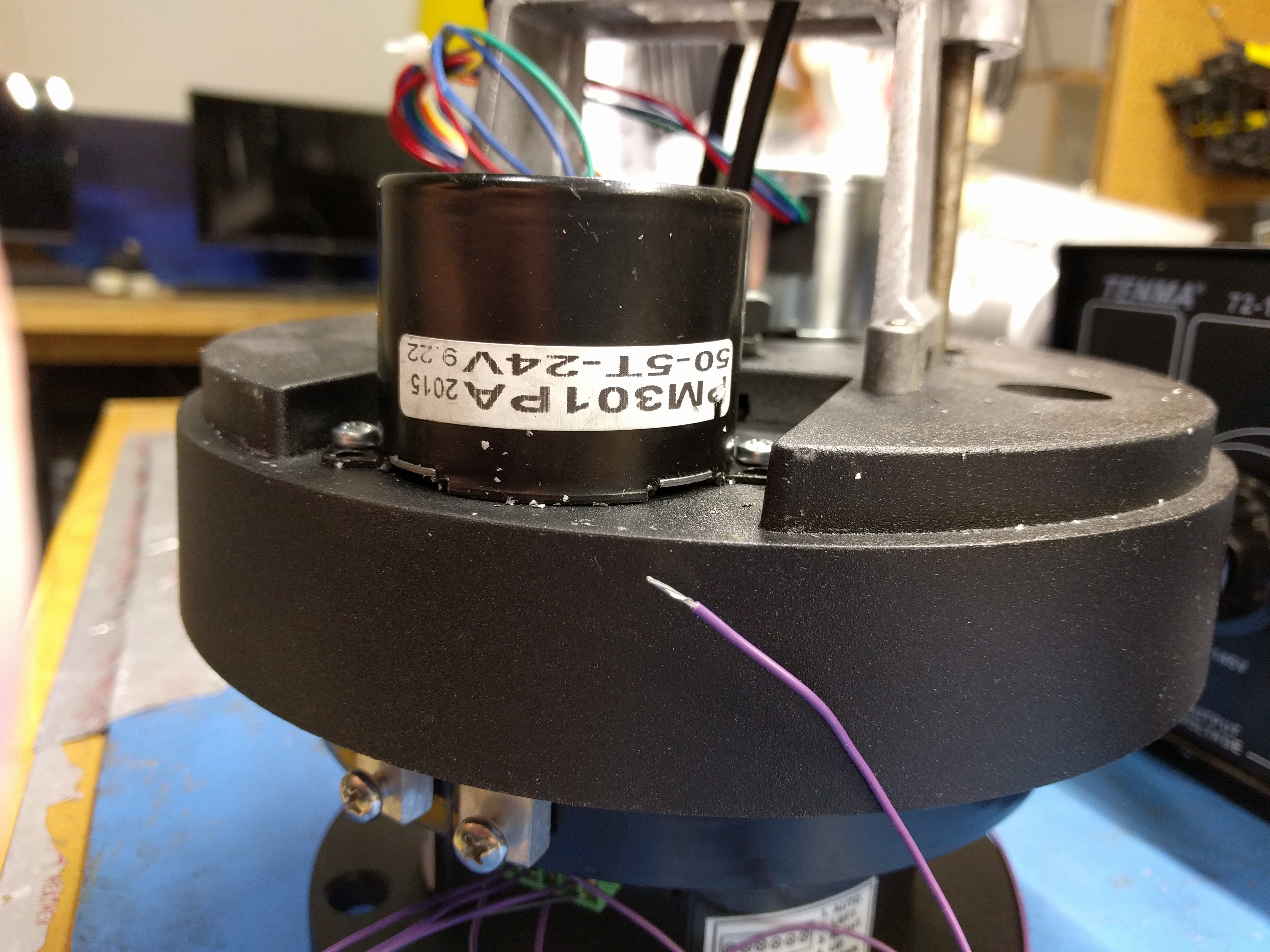
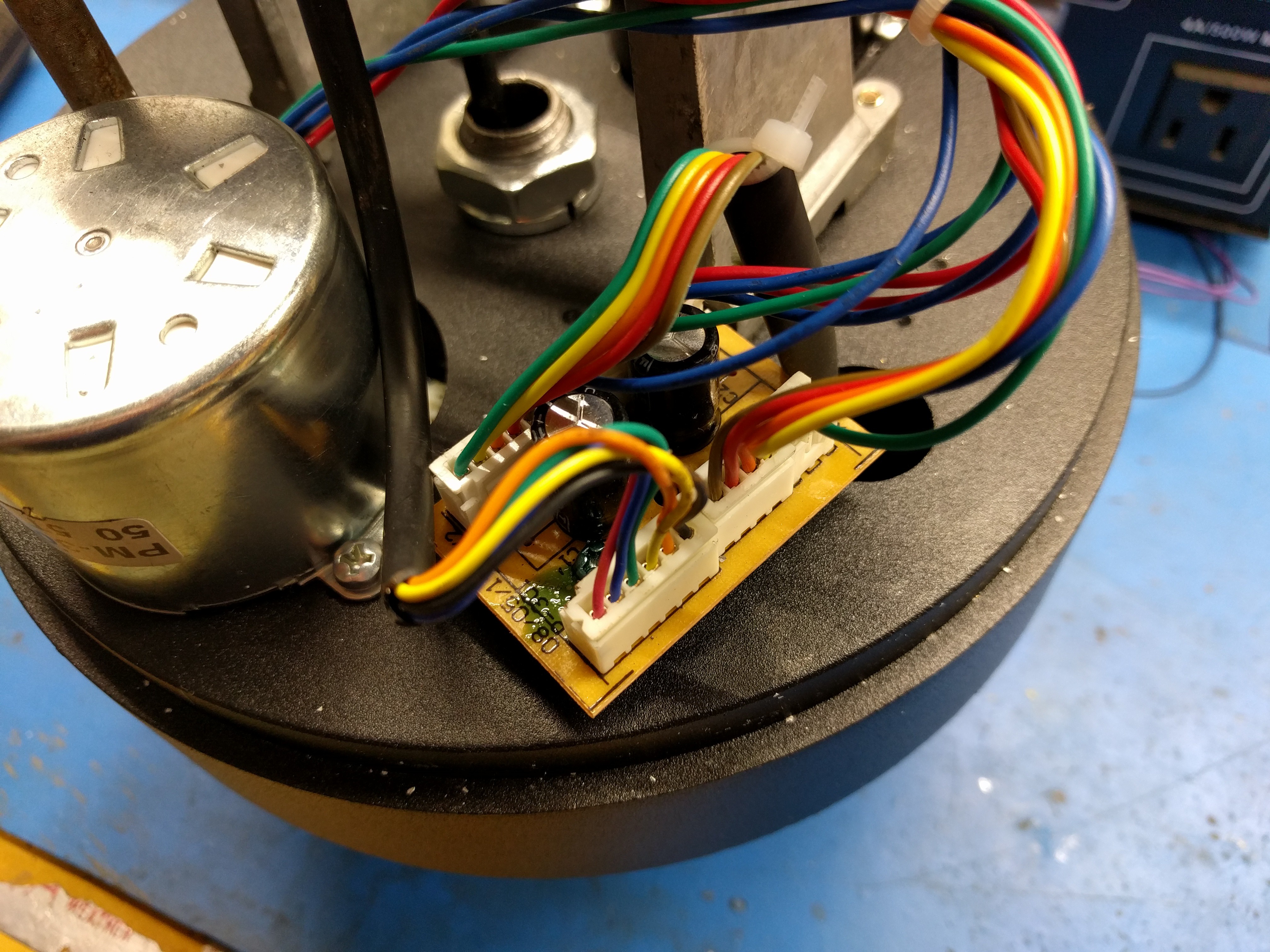
I couldn't find any info about the motors on the internet unfortunately. I can tell that they have four leads. That, plus the PCB with 2 capacitors makes me think that these are Permanent Split Capacitor motors. Since this is an induction type motor, there is unfortunately always slippage so the motor speed will vary with load and is not fixed at line frequency.
I will have to see if this leads to problems where I will have to add position feedback or not. For now, I intend to just rely on the limit switches that are built in to the stage. I do not have direct access to these switches, but I intend to just move the pan and tilt in one direction for a while so both axes will be at their calibrated positions and then go from there based on timing. I'll have to see how quickly position will start to drift and if it's acceptable or if position feedback will have to be added.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.