 iliasam
iliasamNow it is time to final LIDAR assembling.
I have installed encoder to the "main plate", installed the PCB to the PCB holder, installed slip ring to the PCB holder, solder wires of the slip ring to the PCB pads.
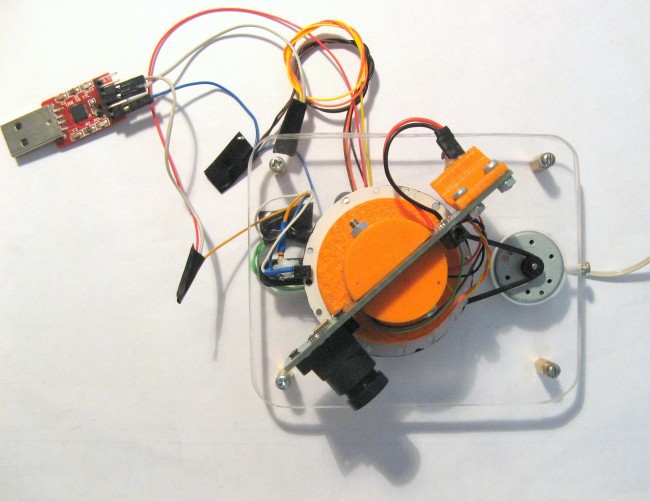
Photo of the assembled LIDAR:
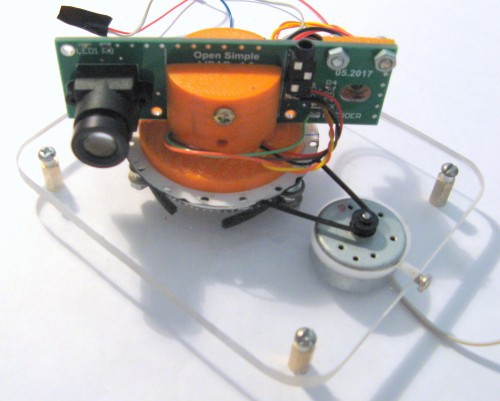
Side view:
I have tested mechanics of the LIDAR - everything is working fine, the eccentricity of the LIDAR rotating head is not very big.
Encoder is working fine too - oscilloscope shows a good signal.
Next steps are assembling small PCB for motor controlling and programming.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.