 iliasam
iliasamI had installed my Open Simple Lidar to the old Roomba and tested it with ROS (including Hector SLAM):
Photo of the lidar installed at the Roomba:

The left board is Orange Pi PC running ROS nodes (Lidar node, Roomba node, Hector SLAM).
All robot controlling was manual (using keyboard).
The resulting map of the rooms:
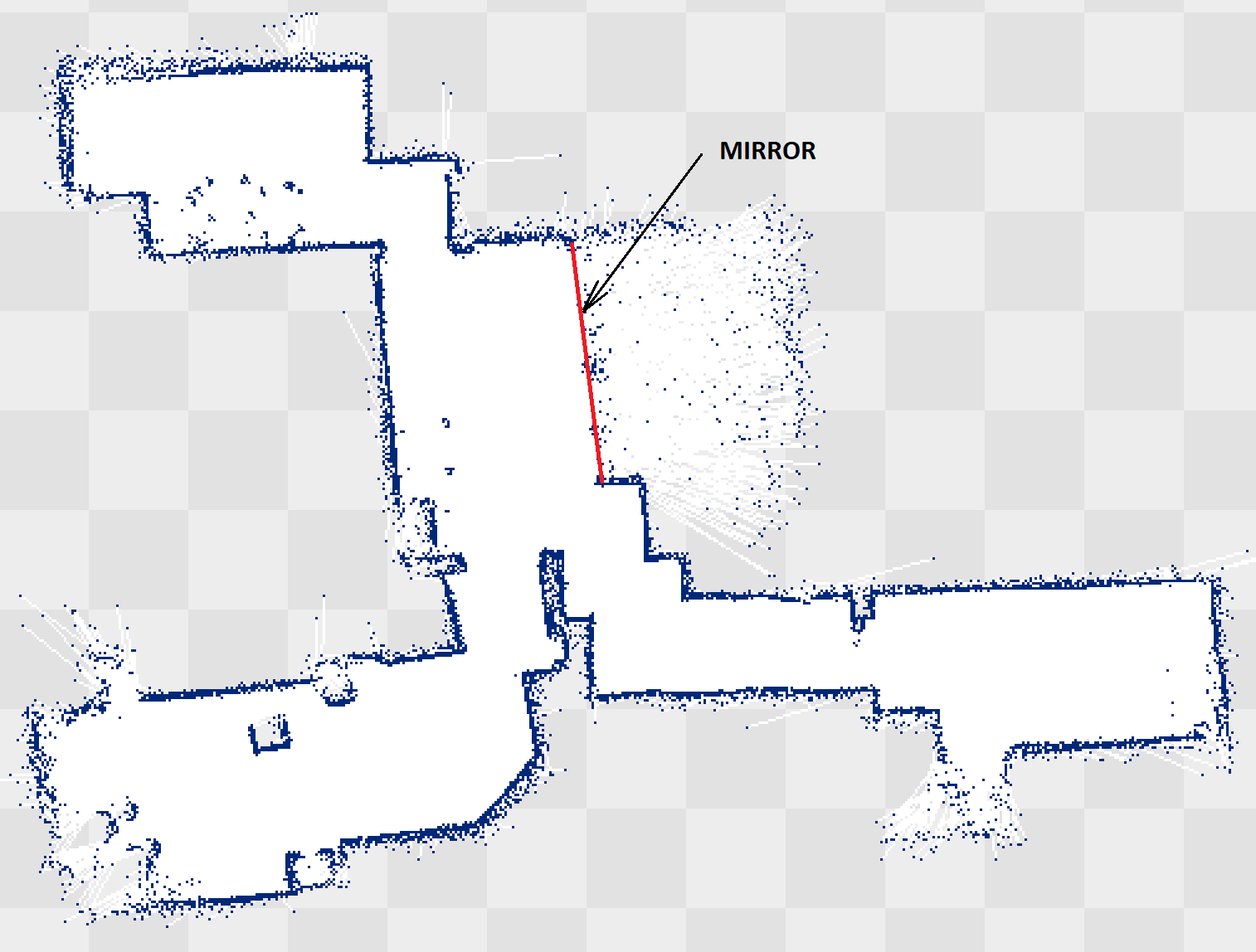
This map was created with a lidar working in 2 deg angular resolution mode.
Also I had published Firmware code and lidar ROS node at the Github.
Next step is increasing parameters of the Lidar by optimizing its firmware.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.