 Kristjan Berce
Kristjan BerceUpdate that is also included in Project Logs, but I'll put it here non the less.
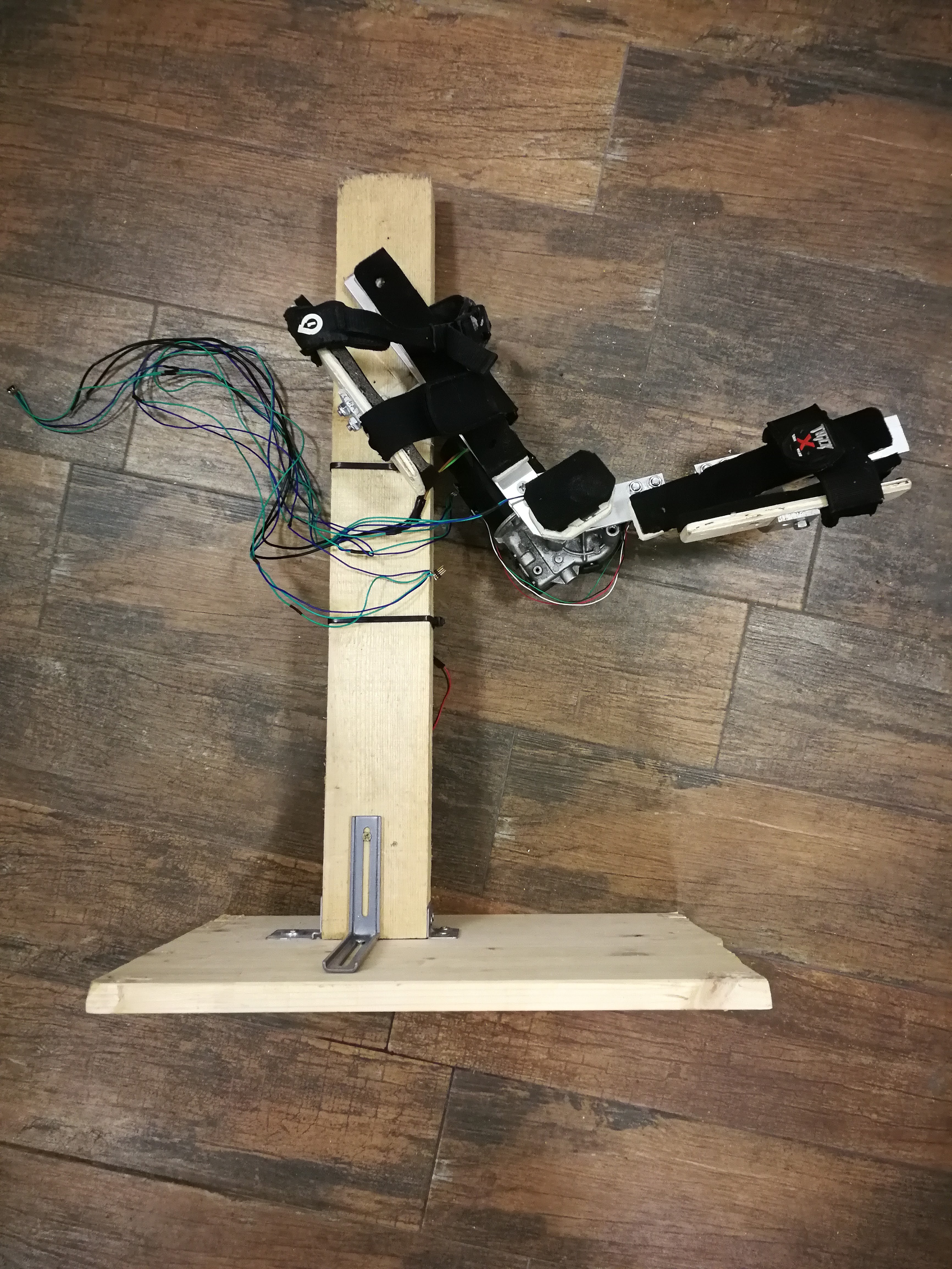
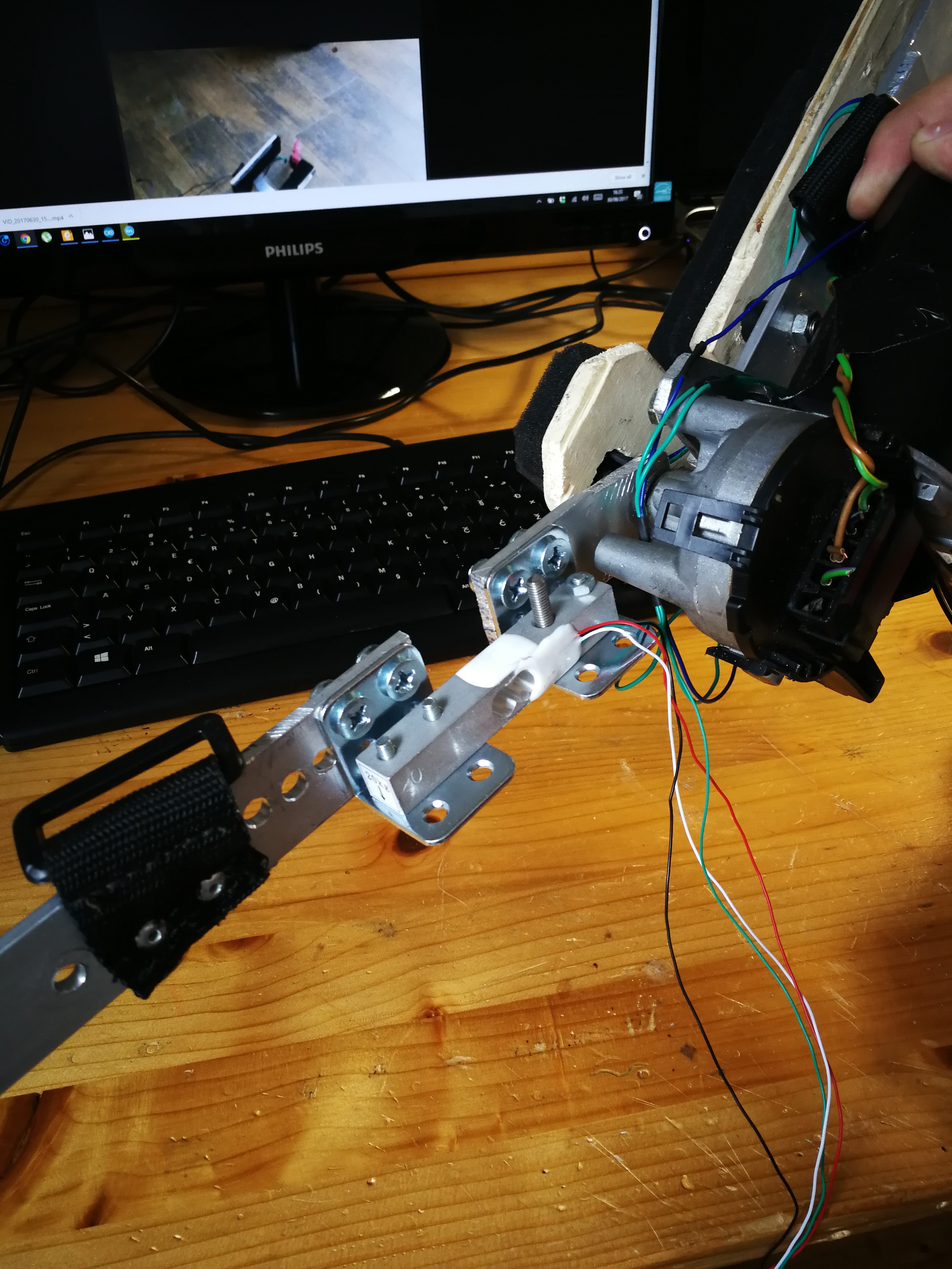
First prototype is complete!
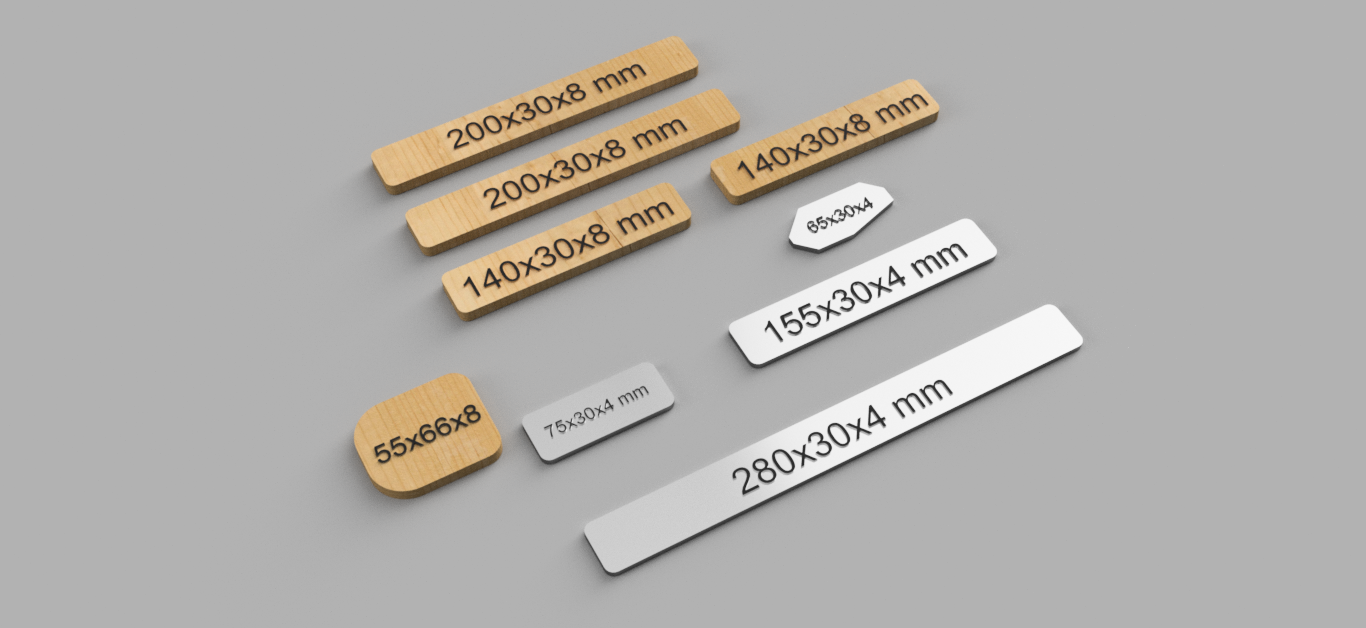
How to make it:
Measurements are not defined because until the arm is "universal size" the lengths vary from person to person. So the best act will be that you measure your own arm and use those measurements.





 Dan Royer
Dan Royer
 Dan DWRobotics
Dan DWRobotics
 Les Hall
Les Hall
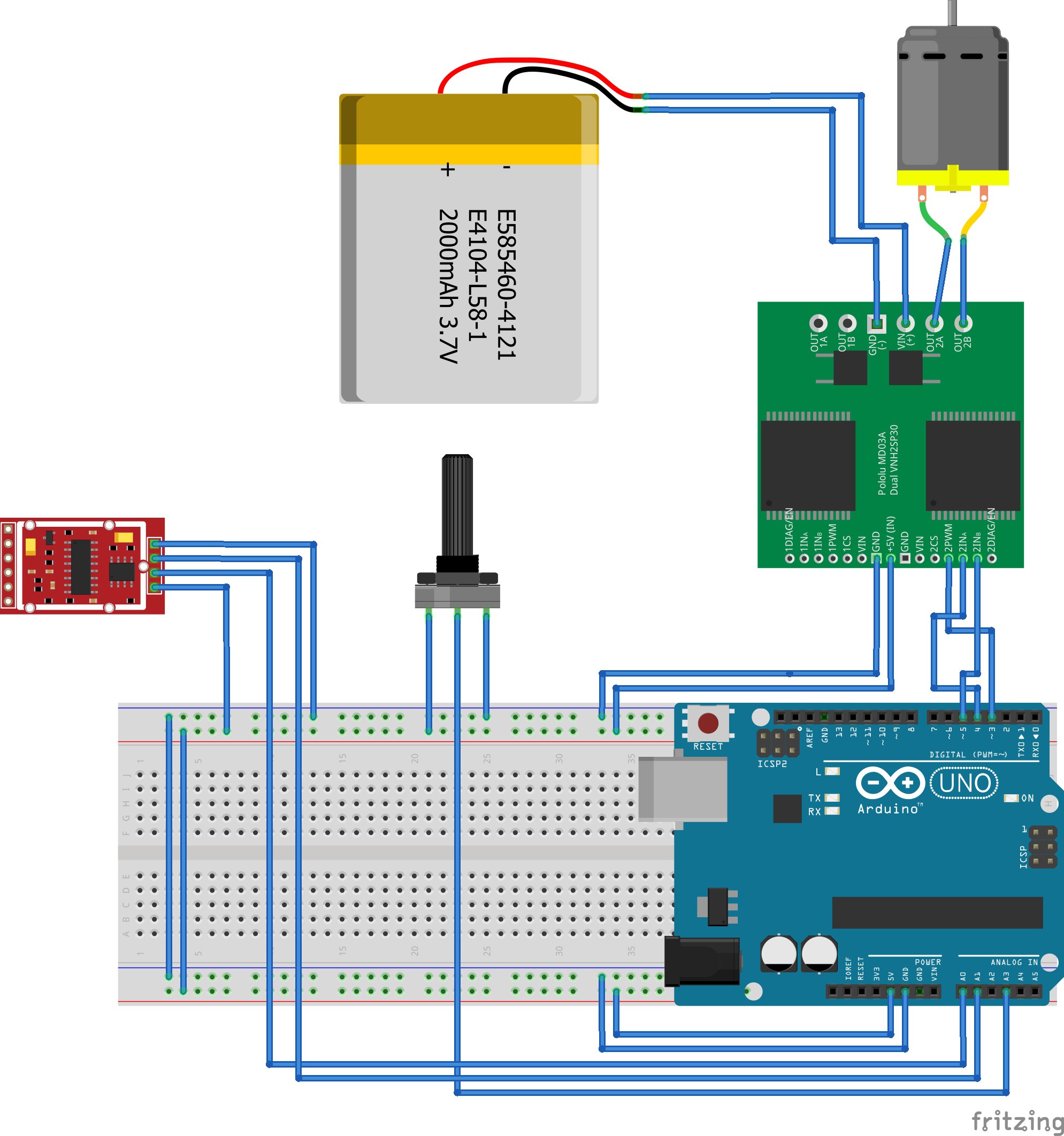
Can anyone explain me the use of strain gauge in this?