 Dennis
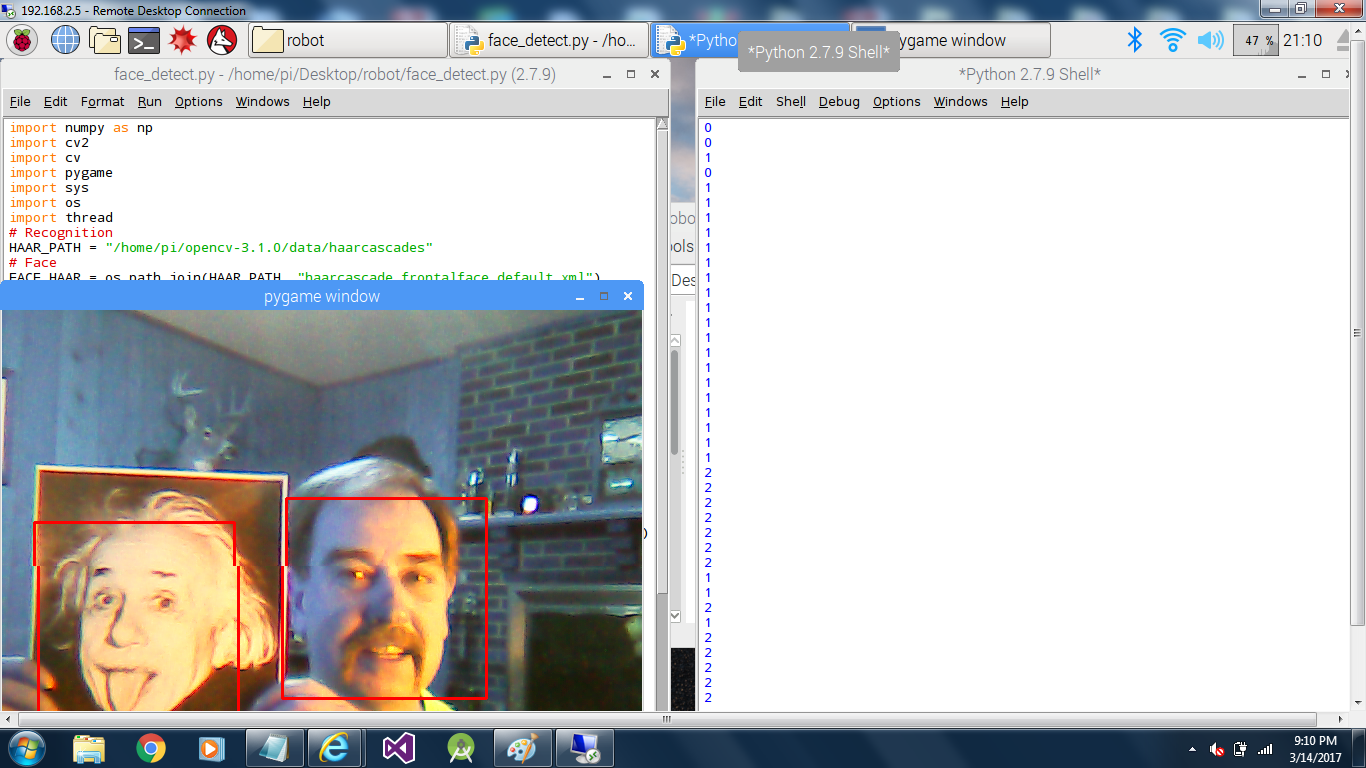
DennisI loaded OpenCV on the Raspberry Pi. I didn’t think there was a need to go through too many details with a lot of tutorials on loading OpenCV on Raspberrys online. Below is a short program to test OpenCV. I used pygame to display the results on my remote desktop.
# Set up haarcascades
HAAR_PATH = "/home/pi/opencv-3.1.0/data/haarcascades"
# Face
FACE_HAAR = os.path.join(HAAR_PATH, "haarcascade_frontalface_default.xml")
face_cascade = cv2.CascadeClassifier(FACE_HAAR)
#Set up cam and pygame
cam = cv2.VideoCapture(0)
pygame.init()
#create fullscreen display 640x480
screen = pygame.display.set_mode((640,480),0)
while(True):
ret, frame = cam.read()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray_small = cv2.resize(gray, (160,120))
faces = face_cascade.detectMultiScale(gray_small, 1.3 , 5)
for (x,y,w,h) in faces:
cv2.rectangle(frame,(x*4,y*4),((x*4) + (w*4),(y*4) + (h*4)),(255,0,0),2)
pg_image = pygame.image.frombuffer(frame.tostring(),(640,480) ,"RGB")
screen.blit(pg_image, (0, 0)) #Load new image on screen
pygame.display.update()
print len(faces)
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
cam.release()
cv2.destroyAllWindows()
sys.exit()
I plugged in a USB Camera and ran the program.
Here’s the results…It works!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.