 Brenda Armour
Brenda ArmourI have installed all the GertBot software and now I am ready to test the camera with Microsoft Cognitive Services. Below is a short video of the buggy moving:
The camera is mounted on a Raspberry Pi 2. I have wired the connected Pi Camera using Node Red. The flow is shown here:
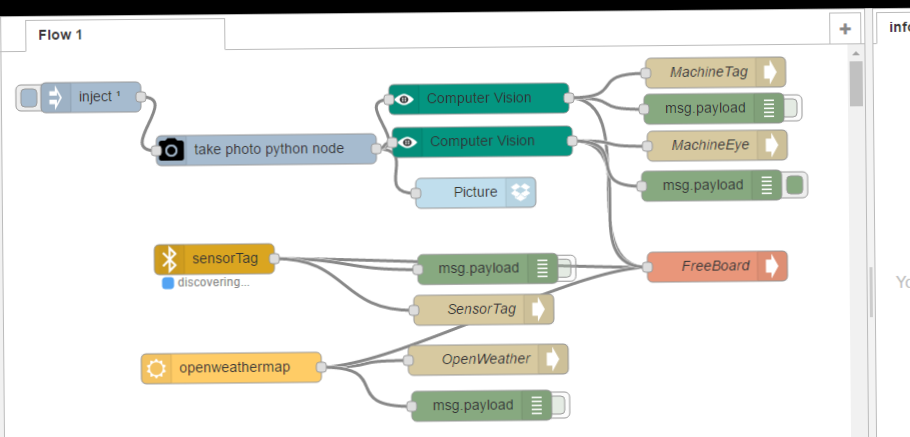
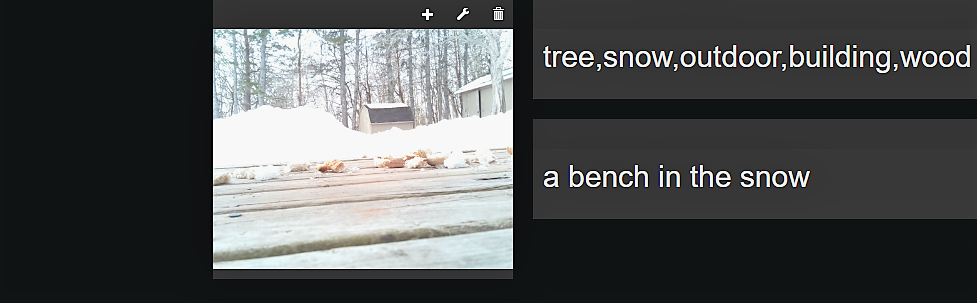
I will present the details later. The most important elements for now is to trigger a picture that will connect to DropBox and Computer Vision to generate some tags and description of what the camera sees. For now I have placed the buggy on my deck:

Let's see if we can catch some crows. I brought the camera outside and provided some tasty bread crumbs. Where are you guys ??? The tags and description are bang on but no crows today :( Google tells me to to try shelled peanuts.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.