 Benjamin Prescher
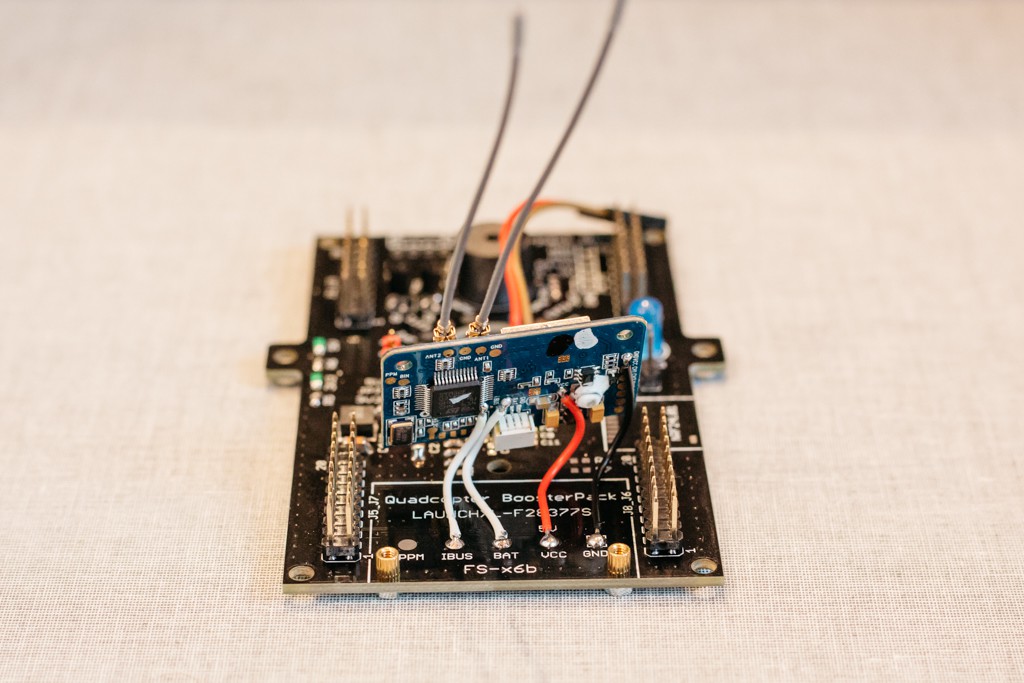
Benjamin PrescherThe printed circuit board offers the soldering connection for ESCs, voltage supply with a low-voltage controller, solder pads for a NRF24L01 mini breakout board as well as other freely assignable connections. An MPU9250 module and a BMP280 module are included for the position control. It is also possible to connect a GPS module. The board offers just enough space to accommodate a flysky x6b receiver.
0%
0%
TI F28377S Quadcopter Boosterpack
Learn to fly your Quadcopter with TI C2000 Microcontroller
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 adria.junyent-ferre
adria.junyent-ferre
 Maya Posch
Maya Posch

 Hacker404
Hacker404