 Benjamin Prescher
Benjamin PrescherAfter finishing my master thesis there was some time to keep up with the quadcopter booster pack.
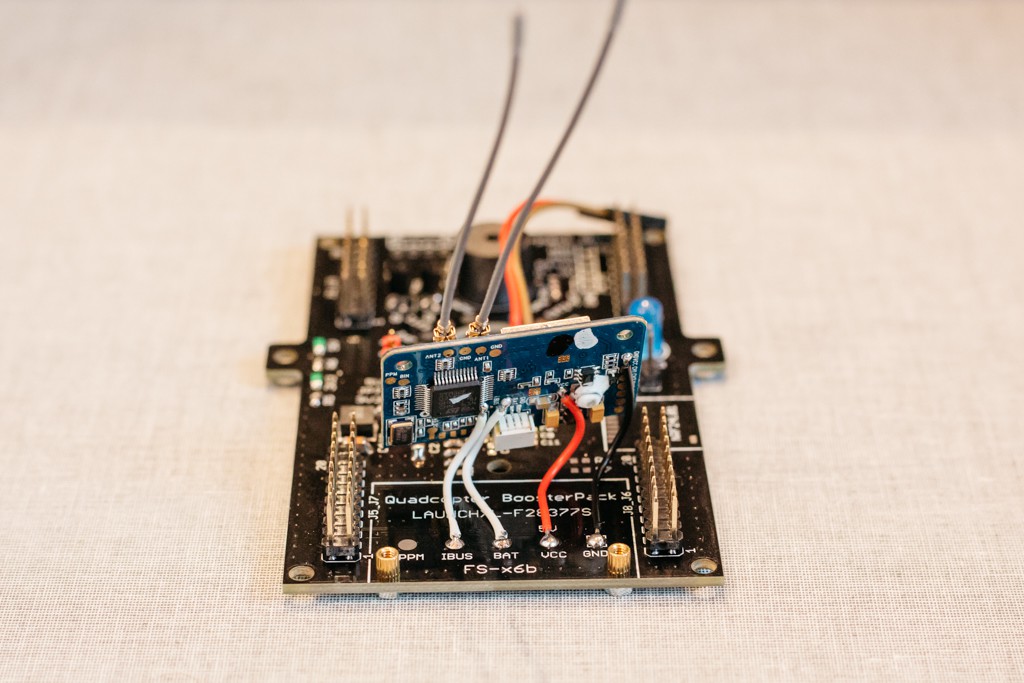
So far, I get well scaled angles using the MPU9250 and the Madgwick algorithm. In the same way, the remote control signals can be read in via the UART interface using Flysky IBUS protocol. In the next step, I will initialize the PID controllers and PWM peripheral to control the ESCs.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.