 Dane Gardner
Dane GardnerMotivation
While there are existing mounts that are WiFi capable, none of them give the flexibility of a system running Linux. If I have SSH access to my scope, I can do pretty much anything. With this in mind, the Raspberry Pi Zero W is also only $10, and the difference in price between the Celestron Evolution and the SE series is over $500. While there are far more features in the Evolution than just WiFi, if this is your only reasoning for the upgrade, it's tough to rationalize this additional expense. Likewise, there is no equatorial mount with WiFi available in the price range of the AVX (my other telescope mount). Hence my addition of a RPi Zero W to each of my mounts.
Background
I have been mulling this project over for several months now, trying to figure out a way to fit a Raspberry Pi Zero with a USB WiFi dongle into the Nexstar hand controllers that came with my mounts. There didn't seem to be an easy way that didn't involve 3D printing a new back for the controller, which I wasn't opposed to, but was a little more work than I had time for. Then the Zero W was released, and I jumped at the chance to simply plop it in without any fuss, and have the added bonus of Bluetooth!
I'm simply amazed at how easy this hack has been, and how well it translated between my serial and USB based hand controllers. Now, if the clouds here in Seattle would just go away, I could actually enjoy using this upgrade!
Requirements
I set out with several requirements in mind, and have met all but one so far.
- seamless original functionality [COMPLETED]
- ability to SSH into telescope mount [COMPLETED]
- full remote control of mount using OSS astronomy software [COMPLETED]
- better scope slew interface (joystick) [COMPLETED]
- automated time via NTP and RTC [COMPLETED & COMPLETED]
- automated location settings via IP address geolocation [COMPLETED]
- automated location settings via GPS [TODO]
Keeping the original functionality of the telescope mount is a must. Dragging the scope out into the field and being able to use it without a computer when I just want to do simple visual astronomy is a hard requirement. However, I would like to try to make this a little easier.
Currently, the original functionality requires manually entering your location, and the date and time. This could be automated with geolocation of the external IP address and NTP when connected to a network. Eventually, I'd like to add a GPS module to handle this functionality even when away from an Internet connected network.
The ability to remotely make adjustments to the configuration of the libindi server, perform software upgrades, and install new software without cracking open the case to have physical access to the integrated computer is a must. The most secure way to gain access to this is through an SSH connection.
After a lot of research and experimentation, I found that Kstars in combination with libindi make a great pairing for a remote telescope control project. Kstars even has an Android app that allows control from a cell phone! The main developers for libindi and Kstars seem to be hardware hackers, so there's awesome new features being added regularly to the project.
I've always disliked the hand controller on my Celestron telescopes. It's clunky in the dark, and when you're wearing gloves it's nearly impossible to tell which button you're actually pressing. I'd love to be able to use a Bluetooth SNES controller instead!
More Information
- If you have a standard RS-232 controller check out the instructions section for details on how to make this modification yourself
- If you have the USB hand controller, then read through this quick build log for modifications to the original instructions

 Be sure to add the 'Joystick' driver to the libindi server configuration in the web manager interface!
Be sure to add the 'Joystick' driver to the libindi server configuration in the web manager interface!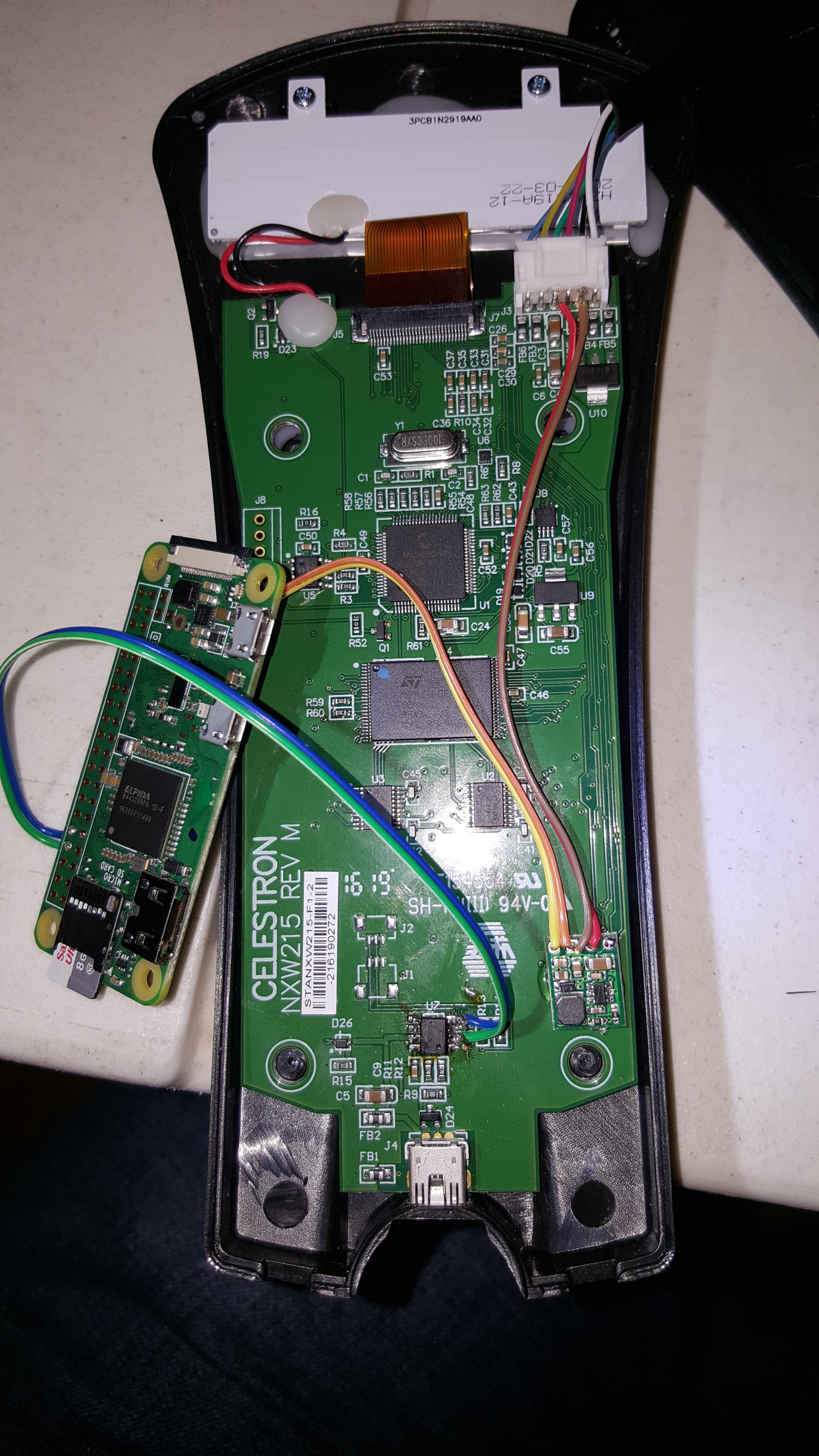






 Jara
Jara
 Ken Yap
Ken Yap
 pastcompute
pastcompute
 treibair
treibair
Hi Dane, Cool project and seems to be a good alternative for my troubles using SkyPortal. Right now I connect a USB converter to the handcontroller RS 232 plug. It's messy but reliable. I have the Pi Zero and dc buck on order and wonder if this project is still active. Can this remote Indi server work under Ascom/Alpaca? I have quite an investment in Sequence Generator Pro and am not quite ready to try out Ekos.