 Ezu
EzuThe hardware components used in the project
- The remote control is a Flysky FS-T6-RB6 2.4GHz FSI found the 2.4GHz remote control and the receiver at a good price on eBay, somewhere early this year.
- The receiver with six radio channels
it came bundled with the remote control. - The aluminum chassis
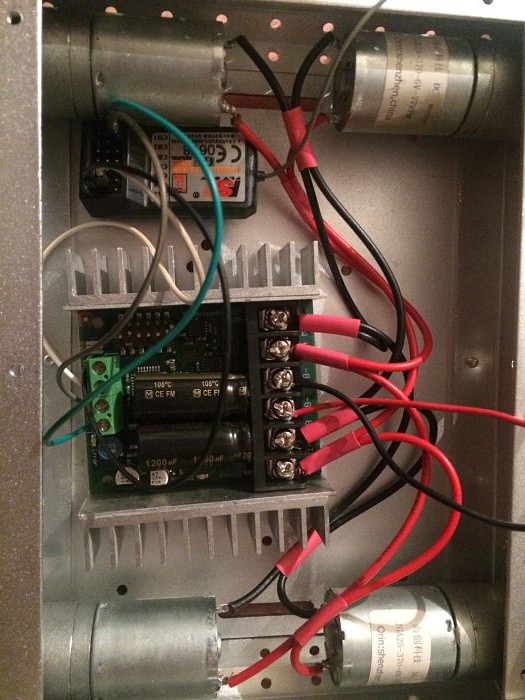
I bought the chassis two years ago to use it outside(in the park, on the street, etc.). So far, I didn’t play with it very long and not outside the home. The reasons are the following: poor performance of the DC motors, wheels of a breakable rigid plastic, relatively small space inside the chassis, so a greater exposure of the components that are mounted outside of the platform. - The Sabertooth 2x25A motor driver
I got it last year and is a powerful motor driver capable of controlling high torque DC motors. The DC motors used in this chassis are low power consumption as well as performance. - LiPo battery
the battery is a 7.4V Zippy with two cells and a discharge rate of 20C. - Power wires and tools
I needed some power wires, a screwdriver, and a soldering iron.
- Testing the robot

 Simone Tolomei
Simone Tolomei
 J3TTBlack88
J3TTBlack88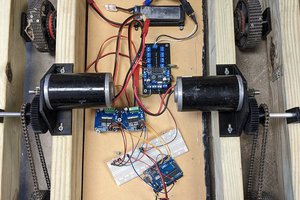
 David
David