 Deezmaker
DeezmakerAs a starting point, I'm making a simple external "visual" array of sensors to see where the actuator would be on the inside.
The basic idea:
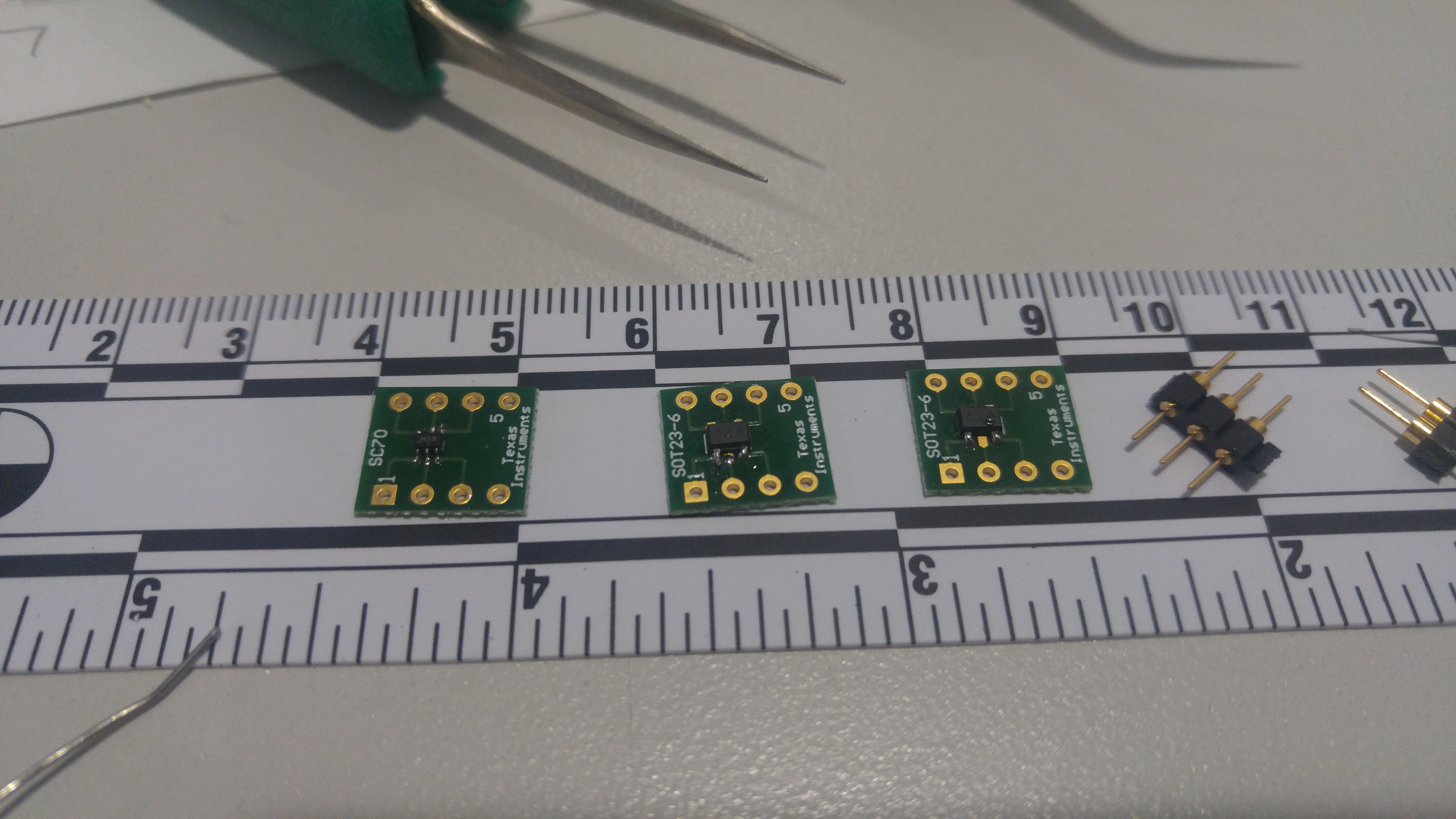
Bottom of board has Hall effect sensors spaced evenly (spacing to be determined after some testing).
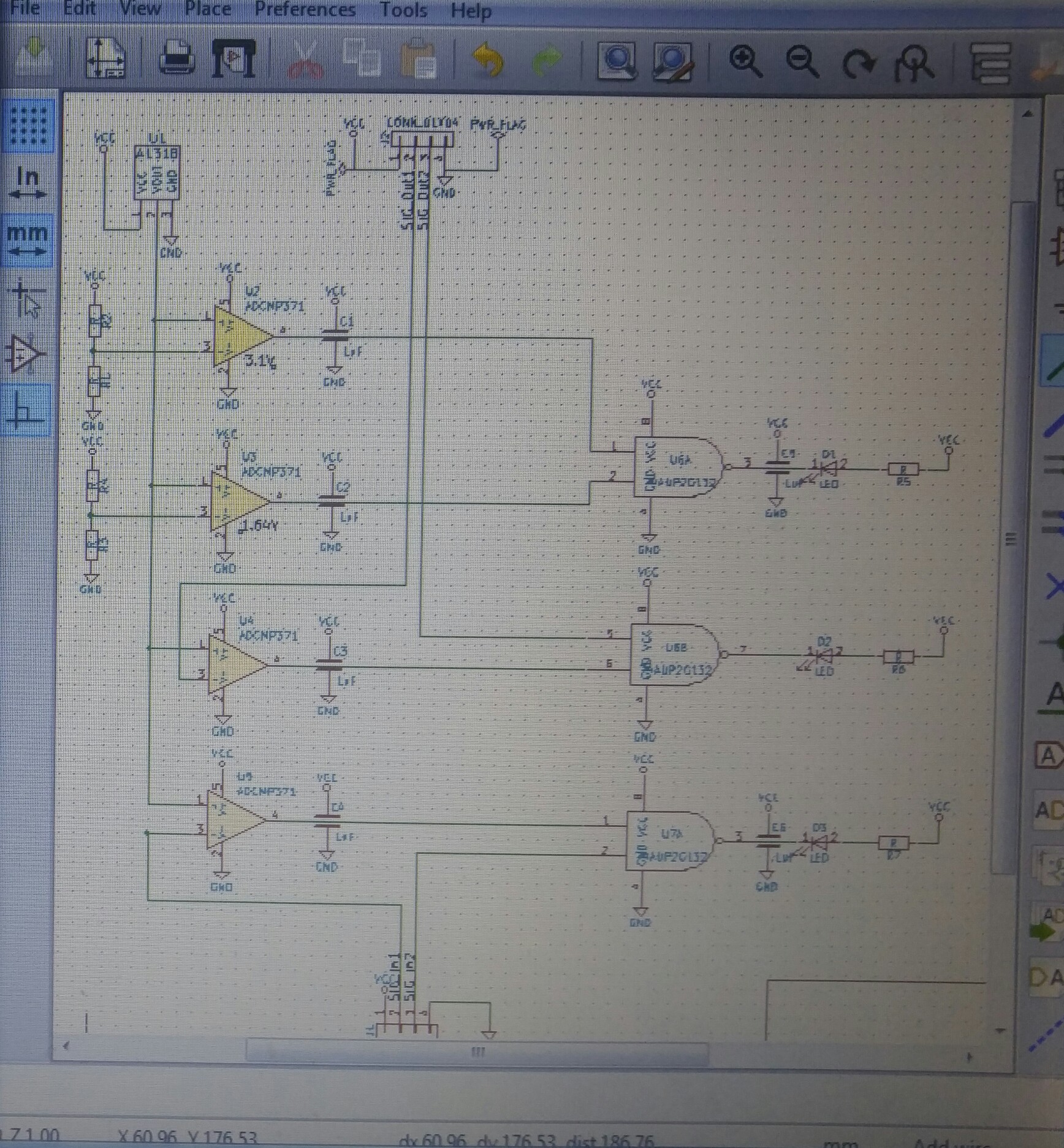
Each Sensor would have 2 or 3 LEDS under it to indicate the magnet's rough position. This is done by getting a voltage level of the adjacent sensor to see which side it's coming from.

 CaptMcAllister
CaptMcAllister
 Bud Bennett
Bud Bennett
 Spencer
Spencer
 oneohm
oneohm