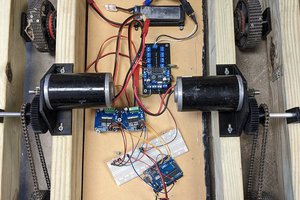
Screws from the battery mount, Tamiya wheel and beam mounting all come through the channel. The 170 tie breadboards can then be slighly sanded and inserted into the channel for the electronics.
For the gearmotors and their enclosures, I superglued the motor into its case. Otherwise it tended to slide a little bit which wasn't ideal.
More details to follow here...
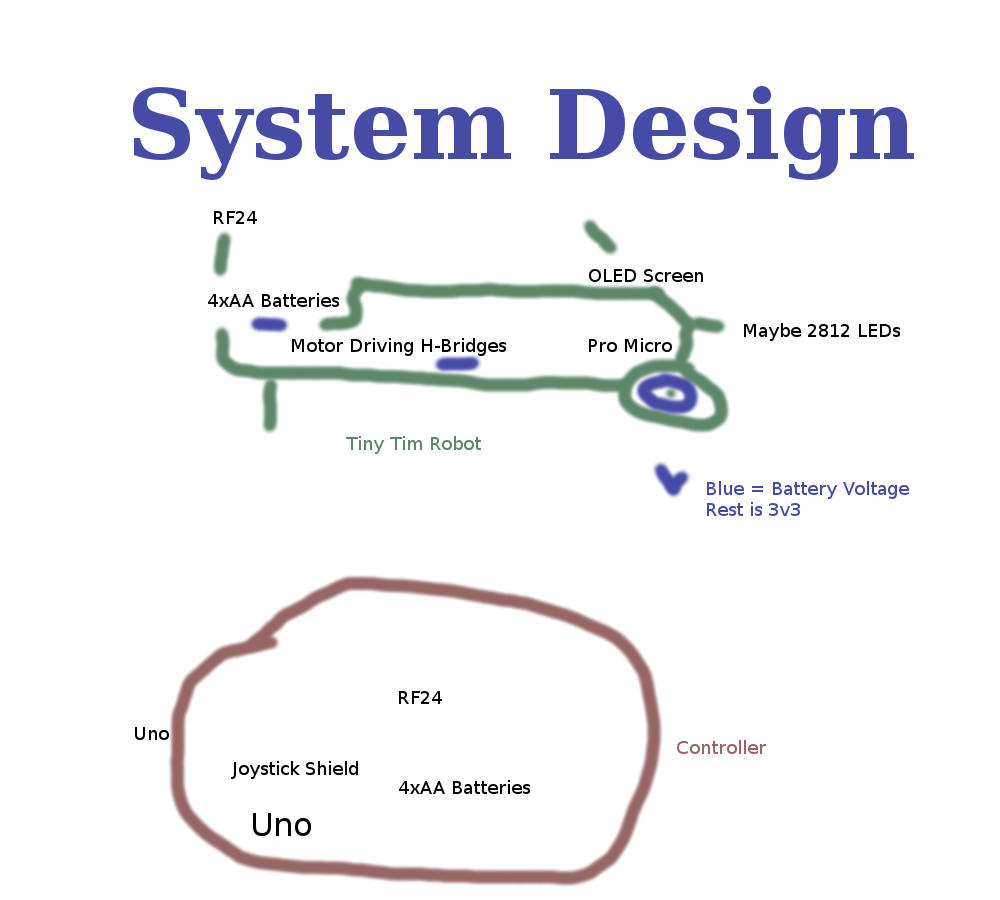
Remote control is simply the joystick shield ontop of the Uno. I hard wired the radio to the top of the joystick shield because it didn't have pass throughs and I wanted the rustic look.

 David
David
 marciot
marciot
 Bob Baddeley
Bob Baddeley