This project aims to solve a common problem: bits are very bad at measuring distances by themselves. They need help of some cooperative atoms to solve this existential issue.
This project is a documentation of one such collection of atoms (ironically, expressed as bits).
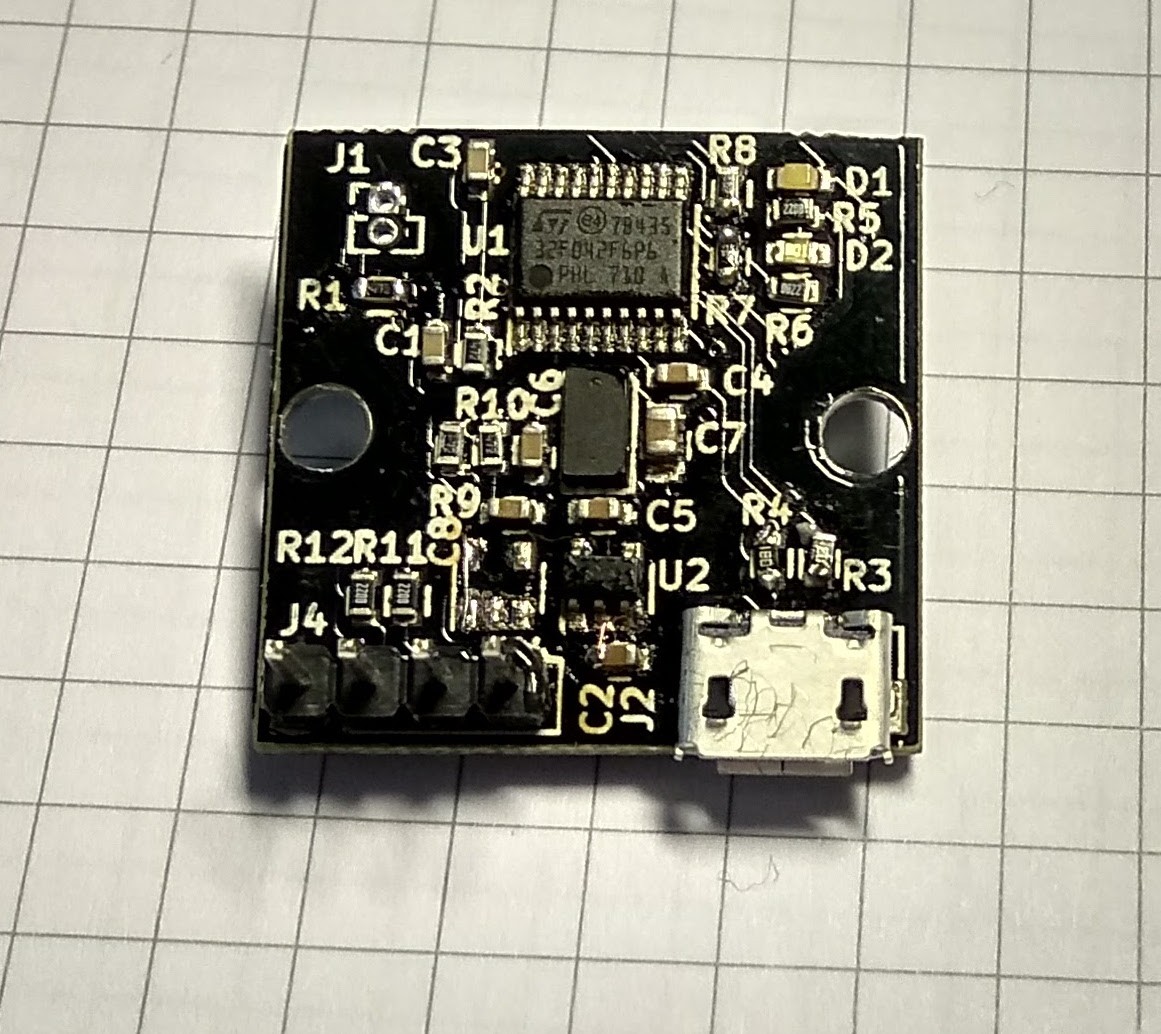
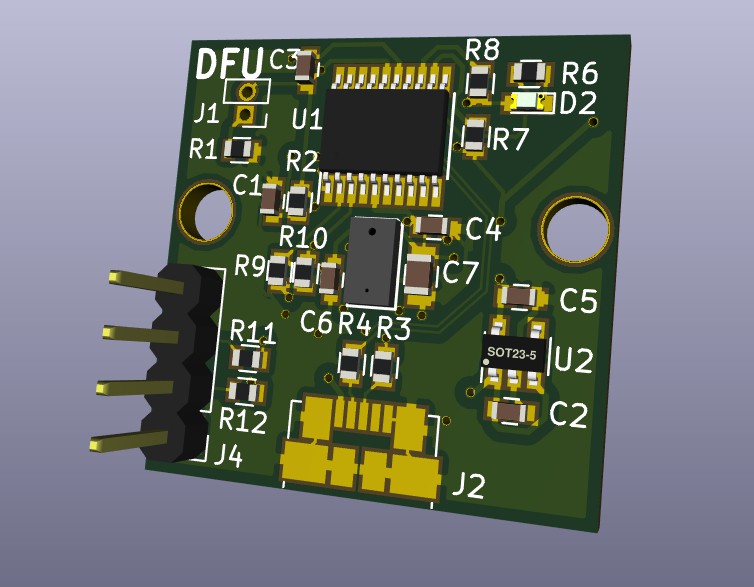
In other words, it's a distance sensor. It's not world-changing by itself and is just a humble component of some larger system that I'm working on.
The project is fully open-source- both the hardware and software is permissively licensed allowing anyone to build upon it. The only restriction comes from me using STM32CubeMX to generate pin & peripheral configuration for firmware side of things. But that is just because I'm lazy and want to move on the interesting project where this sensor will be used.



 Danny Bokma
Danny Bokma

 Dilshan Jayakody
Dilshan Jayakody
 Pure Engineering
Pure Engineering
Wow What an interesting and unique idea on that you are working I will recommend you to carry on working on it just like I am working on rangefindere project you can see here.