0%
0%
Waterpump control with ESP8266
Control waterpump with ESP8266 with some extra safety checks.
 Pauli Salmenrinne
Pauli SalmenrinneBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



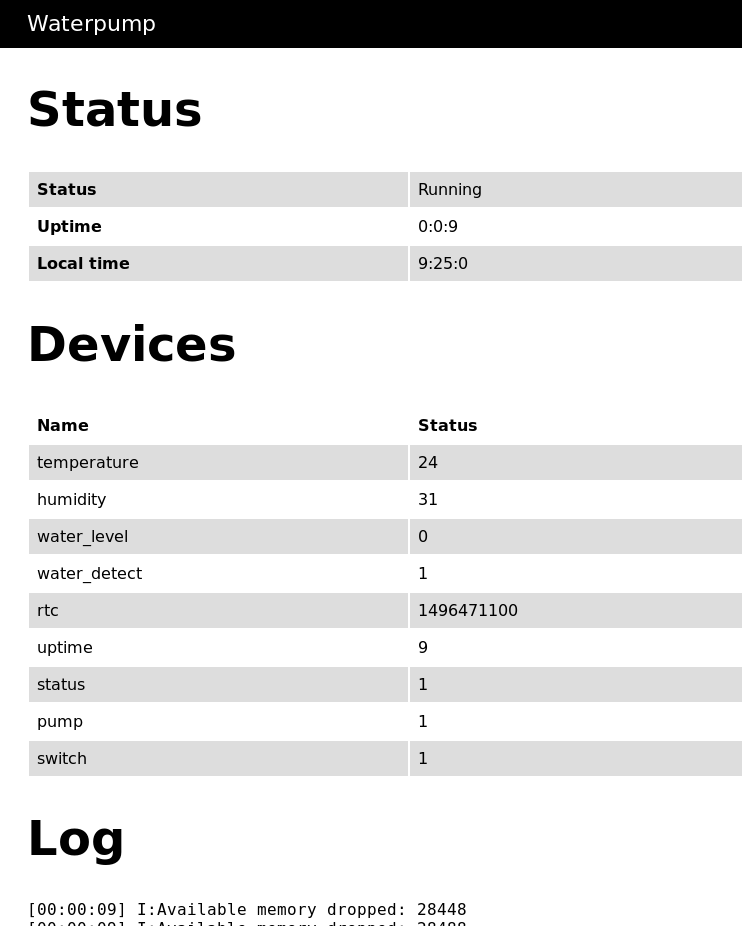

 Here is screenshot of the current main page. Simple.
Here is screenshot of the current main page. Simple.



 Urs Schmidt
Urs Schmidt