A quick bit of rough math while implementing the steering control mechanism:
The stroller has two forks that extend out from the back axle 81cm (32in; this is one of the few things I measure that was undeniably designed in inches). The front tire is a whopping 20" in diameter, which is why I originally picked this stroller.
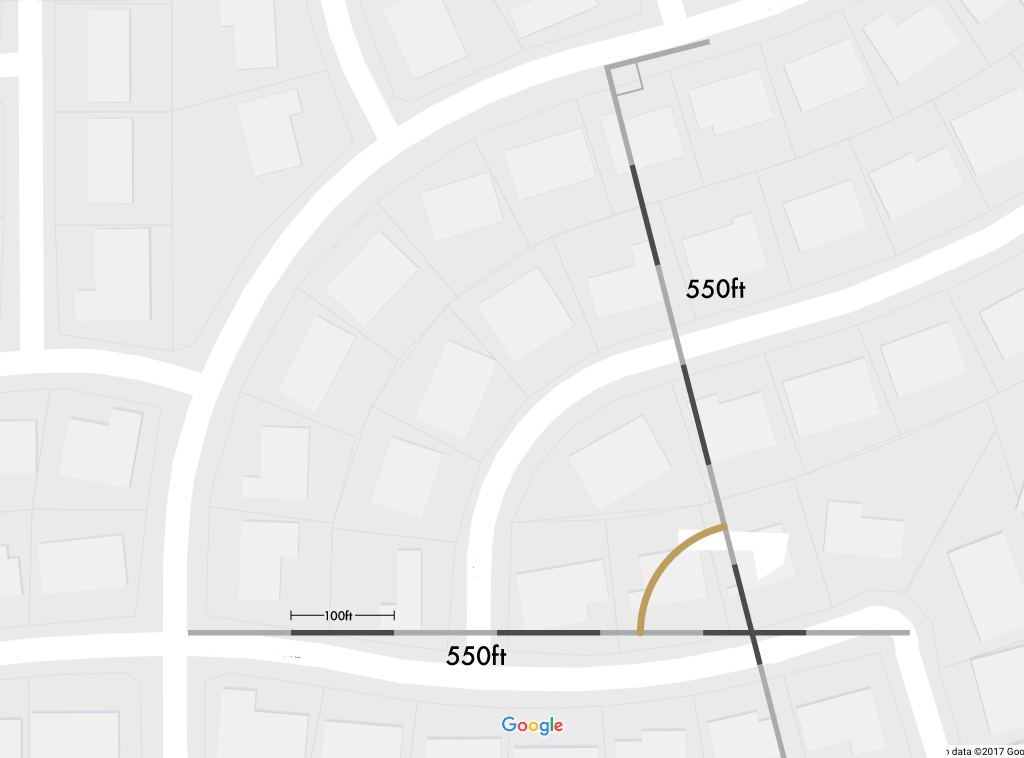
To successfully turn we only need small corrections, which lucky because the forks are only 10.6cm apart center-to-center. A road I often push the stroller on requires a 168 meter (550ft) turning radius, and the tighter circle inside has a roughly 76m radius. With our 81cm wheelbase we only need to rotate the axle
This is .27°. Anyone who pushes a stroller knows how bad it can be if the front wheel isn't aligned; well, there's a quantity to the drift.
At .27° of turn, we will be moving the steering axle (106mm end-to-end), very roughly:
Luckily at these massive radiuses the tolerance to inaccuracy is pretty high, because .5mm is going to be hard to hit with backlash or non-precision hinges. In the real world there's going to be bumps and our steering target (the curb/asphalt transition) will be moving around a lot anyway. And because the computer doesn't care how often it needs to correct steering (although maybe the battery does), we can be confident that this part is very doable.
Let's see how much our deflection will be while not rubbing the tire on the aluminum tubes:
3.3 = (10.6 - 4)/2 where 10.6 is the width of the axle and 4 is the width of the tire
90° - 82° = 8° along the axle. Let's derate it to 6° just to make sure we're not going to rub the tire on the frame.
So, to calculate the turning radius and axle deflection:
Even at the tightest possible turning radius with our 81cm wheelbase, we will have a maximum of 11mm axle deflection. That's some tight turning for a very small input. Depending on how exact the final implementation can be made we might even be able to follow a curb around some city corners!
Note- if you notice any mistakes please comment to let me know!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.