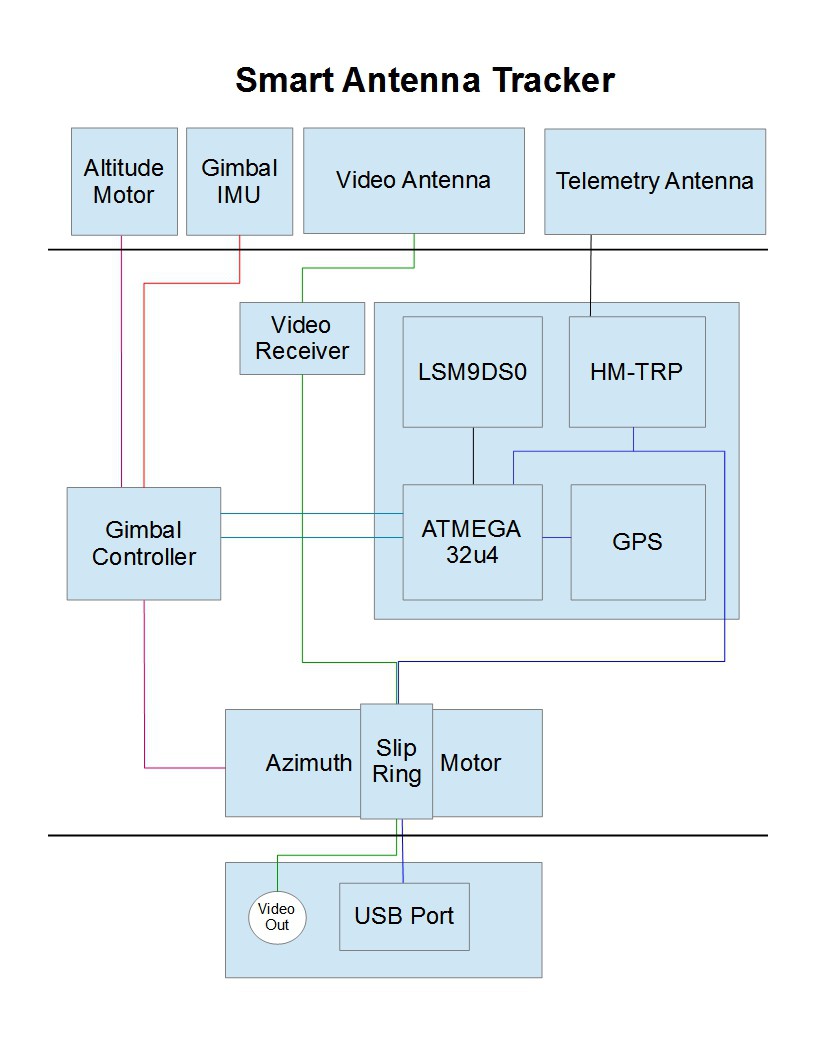
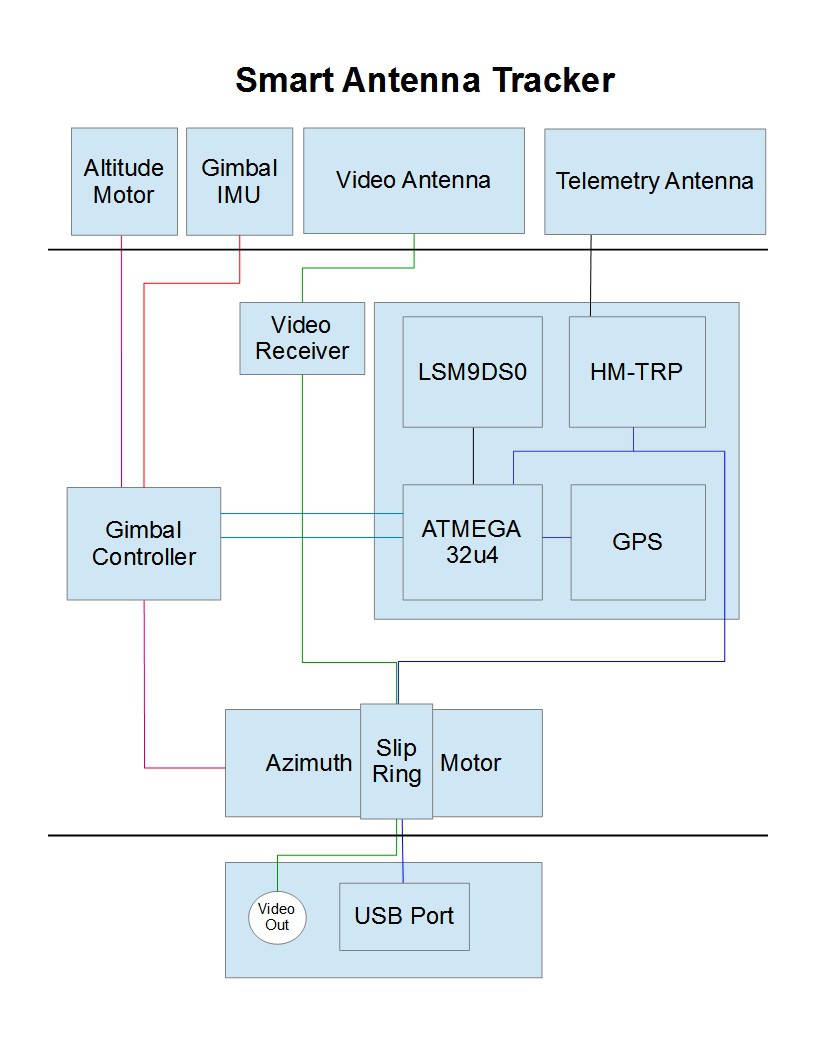
The Smart Antenna Tracker will determine its location and attitude using a GPS, accelerometer, gyro, and a magnetometer. The Smart Antenna Tracker will then determine the 3D location of your copter/plane/rover by sniffing the MAVLink data from the TTL serial line between the radio module and the FTDI chip. With that data the Smart Antenna Tracker can then point the antennas in the direction of your copter/plane/rover.



 Dorijan
Dorijan
 Timo Birnschein
Timo Birnschein
 Jon Buford
Jon Buford
 zacnotes
zacnotes
Brandon, are you still working on this, or stuck out of country? This is a project that interests me greatly. Thanks for what you've done so far!