 Husarion
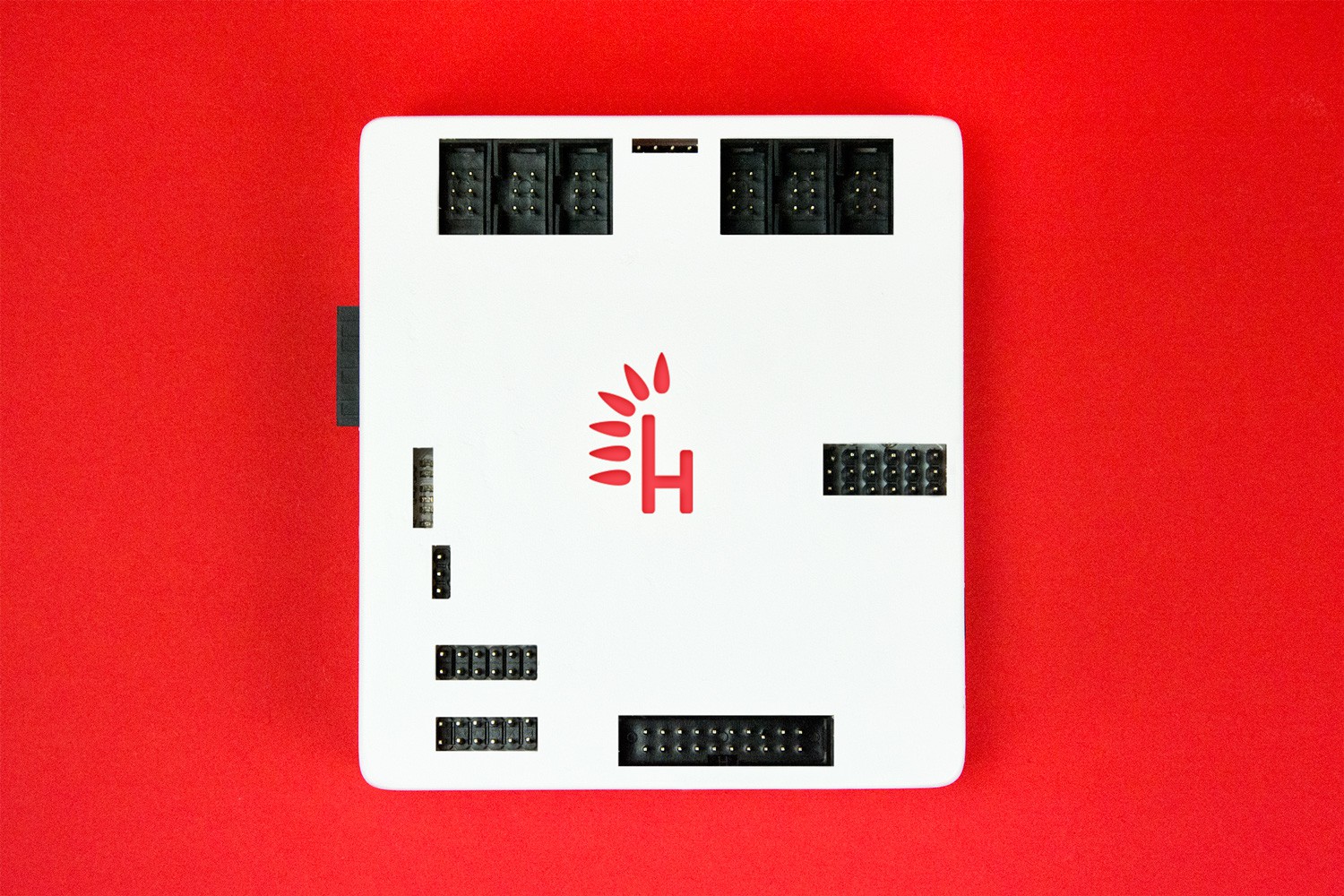
HusarionHardware:
- Real time microcontroller: ARM Cortex-M4 @168MHz, 192 KB RAM, 1 MB Flash
- CORE2-ROS: Board computer: ARMv8 @1.2GHz, 1GB RAM, 16 GB Flash (RaspberryPi 3 or ASUS Tinker Board)
- CORE2 (basic): ESP32 based Wi-Fi module
- 4 DC motor outputs + 4 quadrature encoder inputs
- 6 servo ports with selectable voltage level (5 / 6 / 7.4 / 8.6 V)
- 6 sensor ports (4 x GPIO, ADC/ext. interrupt, I2C/UART, 5V out)
- Extension port (12 x GPIO, 7 x ADC, SPI, I2C, UART, 2 x ext. interrupt)
- CAN interface with onboard transceiver
- micro SD card interface
- USB serial port (FTDI chip)
- Supply voltage input: 6 - 16V DC (with built-in overcurrent, overvoltage, and reverse polarity protection)
Embedded software framework:
- C++ 11 API
- Based on Real-Time Operating System
- Using DMA's, interrupts, RTOS features to handle communication interfaces and save processing power
- Handling multiple PIDs in parallel
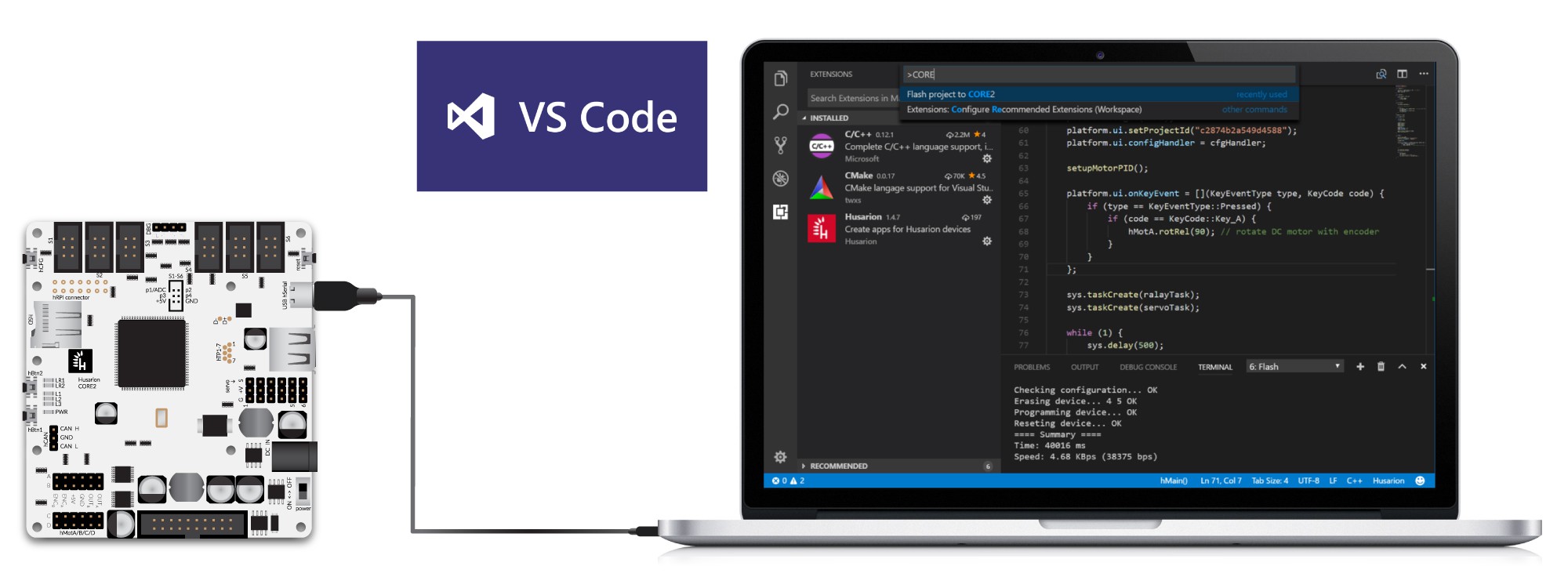
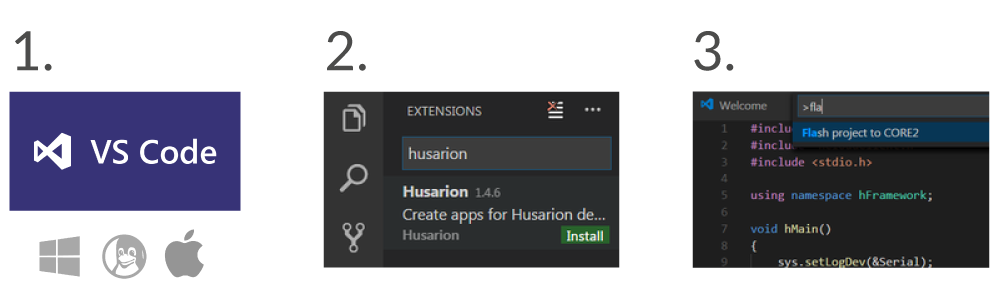
- SDK + Visual Studio Code extension for offline development
- Web IDE at cloud.husarion.com for online development
- Arduino compatibile
- Open source: https://github.com/husarion/hFramework
Support for ROS (Robot Operating System):
- a dedicated Ubuntu based image with ROS for CORE2-ROS
- ROS tutorials: https://husarion.com/core2/tutorials/ros-tutorials/1-ros-introduction/
Cloud:
- All your robots listed on cloud.husarion.com
- Easy creating custom web user interface for each robot
- Robot sharing through link or e-mail
- Streaming video with WebRTC - e.g. for telepresence robot


 Gaultier Lecaillon
Gaultier Lecaillon
 Krzysztof Pochwała
Krzysztof Pochwała
 Petoi
Petoi
 RoboKoding LTD
RoboKoding LTD