 Capt. Flatus O'Flaherty ☠
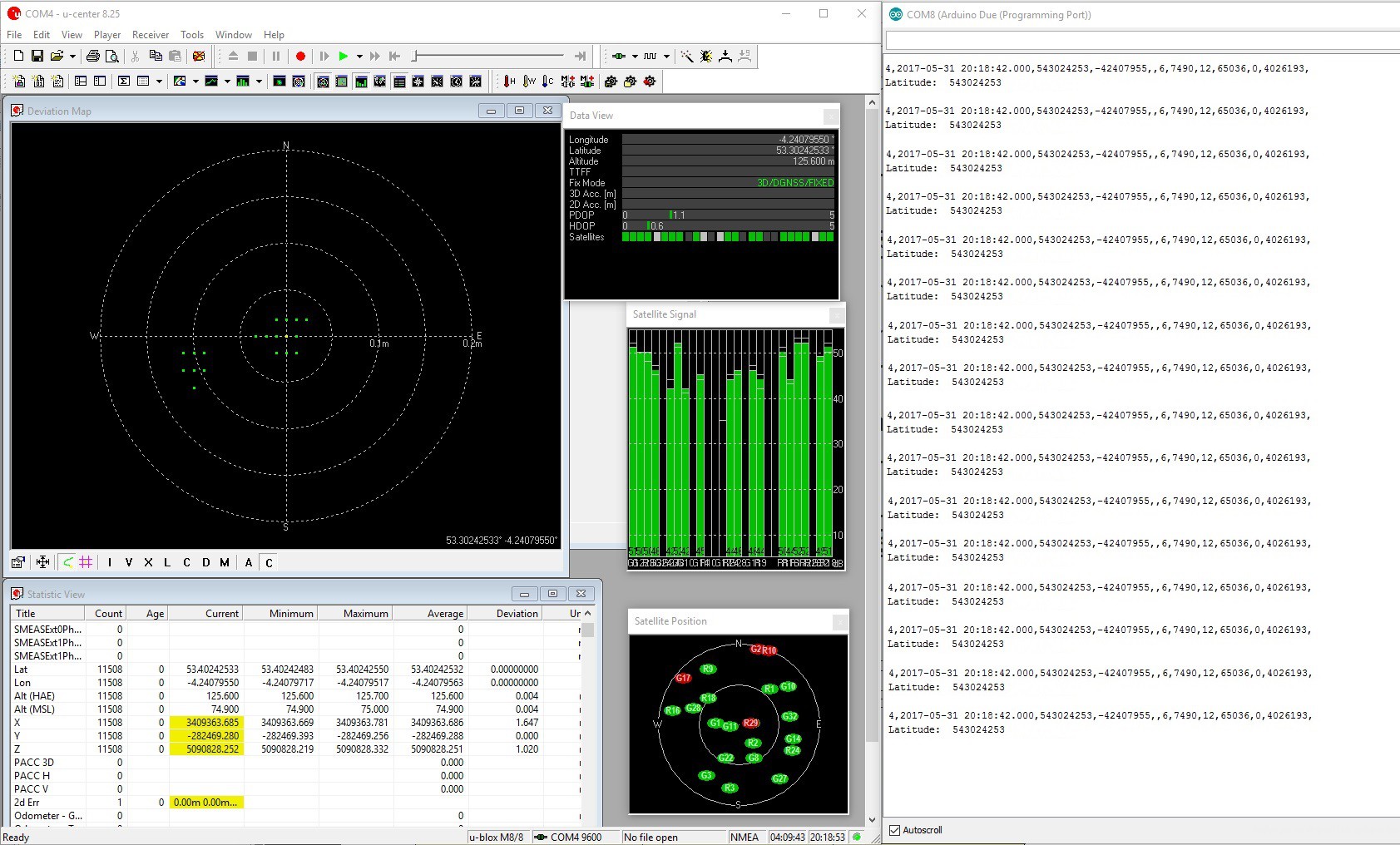
Capt. Flatus O'Flaherty ☠The panel below shows a screenshot of Ucenter and the Arduino serial port over 11508 seconds.
I ran the GPS as base station and rover, with a fix between the two so that the overall error was corrected for about 500 seconds and then moved the rover exactly 100 mm. What we see is two clusters of GPS fixes approx.. 100 mm apart.
The innermost ring is at 50mm and it looks like the overall deviation is 60mm, which means that the rover would wander off course by about 30 mm either side of it's proper course.
So during the 11508 time frame (3.2 hours) the deviation was a maximum of 60mm. I don't have any exact stats for the mode at present but I'd say that about 90% of the time the rover is working to within an overall deviation of about 40mm.
Another test, with everything static, gave worse results with a maximum overall deviation of about 200mm. Maybe some cloud or other weather conditions made the deviation worse?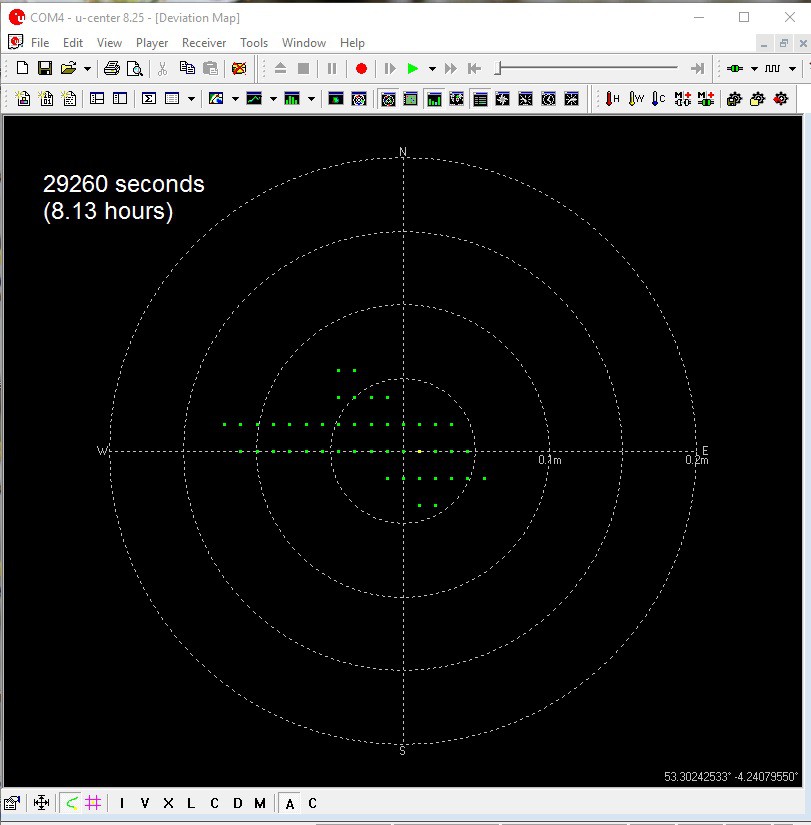
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.