 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠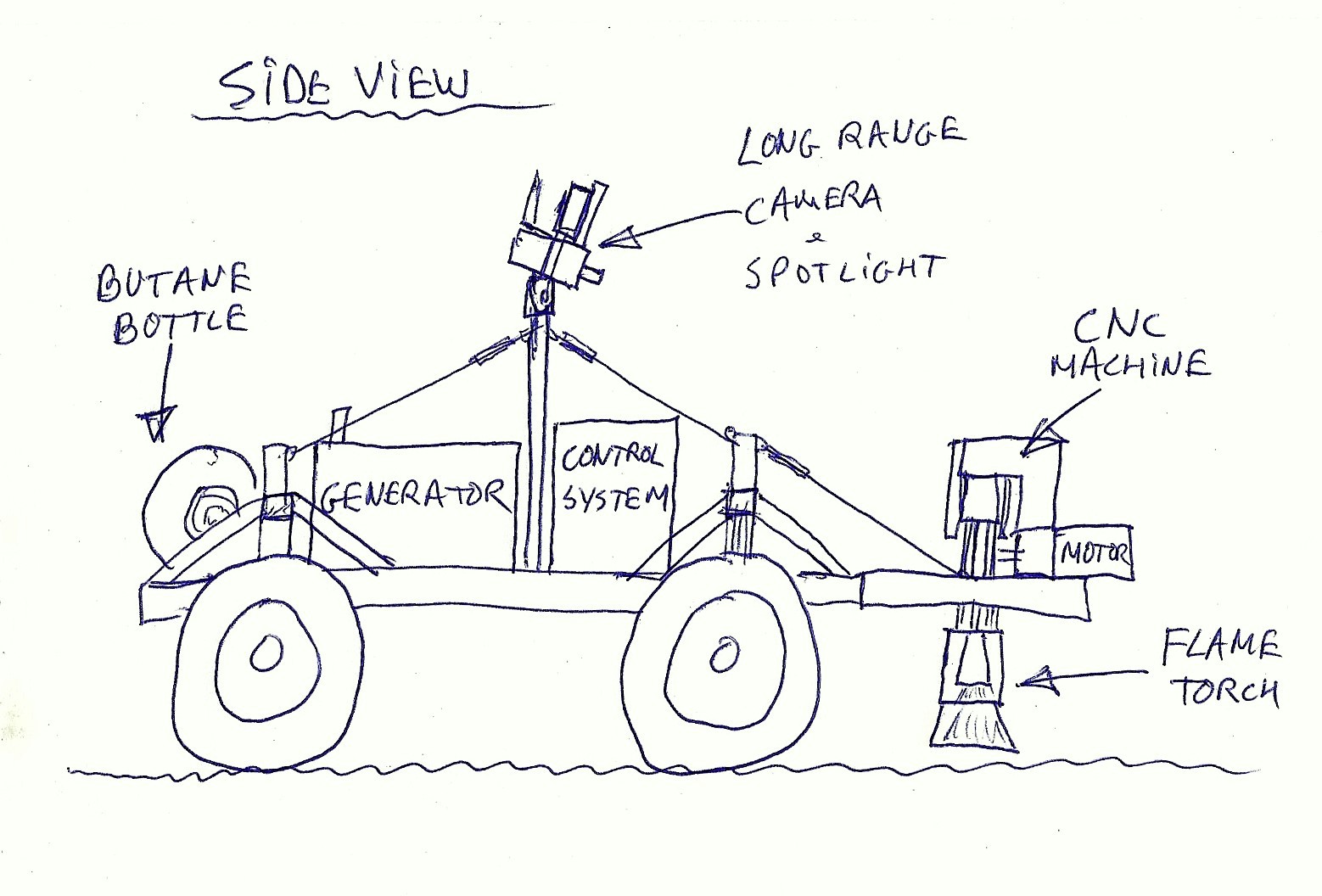 The long range camera will pick up on coloured markers at the corners of the field and create a numerical position for the Weedinator on a virtual grid. Crops can be planted according to the grid and then weeded accurately, as long as the markers don't move for some reason eg birds/animals. The CNC frame is at the front of the machine counter balanced by the weight of the generator and gas bottle.
The long range camera will pick up on coloured markers at the corners of the field and create a numerical position for the Weedinator on a virtual grid. Crops can be planted according to the grid and then weeded accurately, as long as the markers don't move for some reason eg birds/animals. The CNC frame is at the front of the machine counter balanced by the weight of the generator and gas bottle.
Actually, the CNC part needs to be in the middle of the machine which would shove the generator over the right hand side wheels. This is because the CNC mechanism can contain a lot of inertial forces as it move around the X and Y axes and cause the whole machine to wobble. This also accounts for the fact that the suspension is static ie no springs.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.