 Hexastorm
HexastormRecently, I removed the technical presentation from 2017 as it is completely outdated.
One of the things I haven't outlined so far is how to balance the prism.
First let's recall the centripetal force;
Unbalanced rotating masses or rotors have relatively high force effects on bearings. High level of unbalance can cause vibration and deformation.
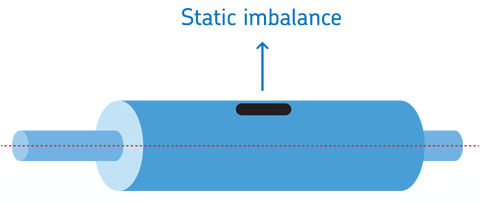
Two types of unbalance can be distinguished; static unbalance and coupled unbalance.
In static unbalance, there is only an unbalance in a single plane
Coupled unbalance occurs if there is a static balance in multiple planes but there still is a net force acting on the rod.
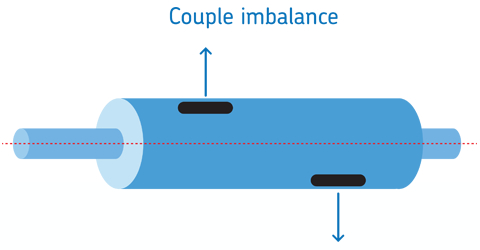
In reality all unbalance is a combination of the two and therewith called dynamic unbalance.
As the prism is quite thin and shaped like a disk, it is assumed there is only static unbalance.
The prism can be statically balanced by placing a reference weight 180 degrees before or opposite to the center of weight which is causing the unbalance (see coupled unbalance and note that here they are assumed to be in the same plane).
To measure the unbalance typically a setup as shown below is made;
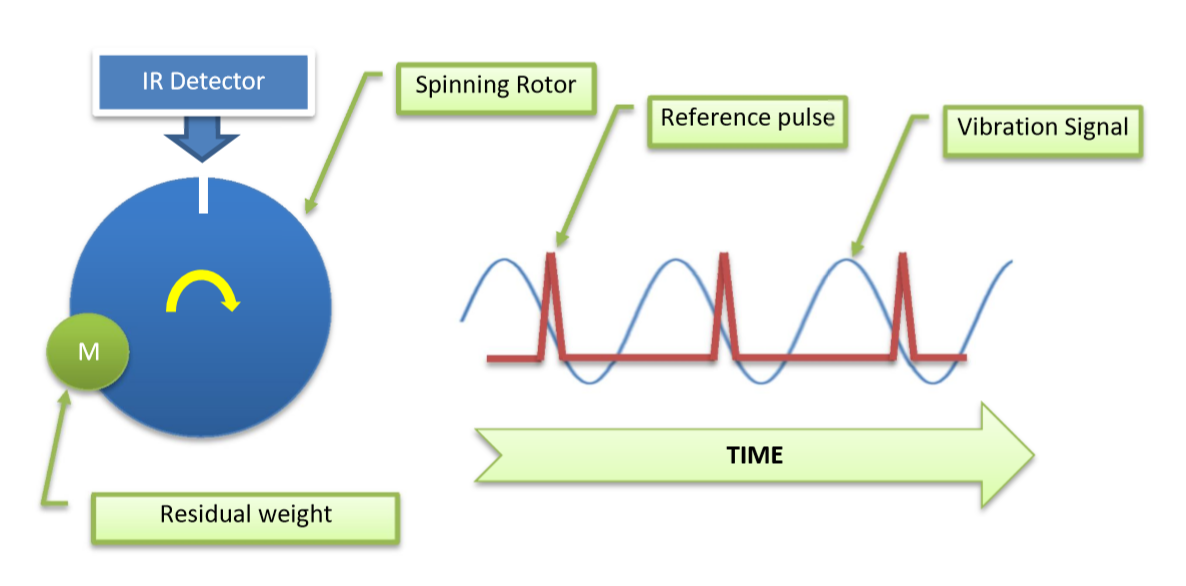
The rotor is spun and a reference weight is placed on top of the rotor. This will now be the primary unbalance. A trigger is recorded for each rotation. Also a signal from an accelerometer is recorded. The accelerometer signal can now be converted to the amount of mass needed in grams and the position in degrees.
The residual weight is removed and the rotor is spun. This signal is used is to calculate the correct reference weight and position.
For a prism system, the top of the prism could be partly blackened. This would than block a laser if it shines through from the top while the prism is rotating. This signal could then be used to balance the prism.
If multiple prisms are balanced, most likely the reference mass only has to be placed once. As all systems are quite similar.
References:
1. Vortex: Dynamic Balancer and Vibration analyzer of Dynex hobby
2. Mechanics of Textile machinery NPTEL, in specific the chapter on Balancing of Machines (page 140)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.