 Hexastorm
HexastormThe current proof of concept module uses the programmable real time unit of the Beaglebone. This is a device similar to a microprocessor and runs at 200 MHz.
In my next iteration, I plan to use a FPGA. FPGA can be faster and offer more tight control. The current model has a vendor lock to the AM355X ARM core of Texas instruments.
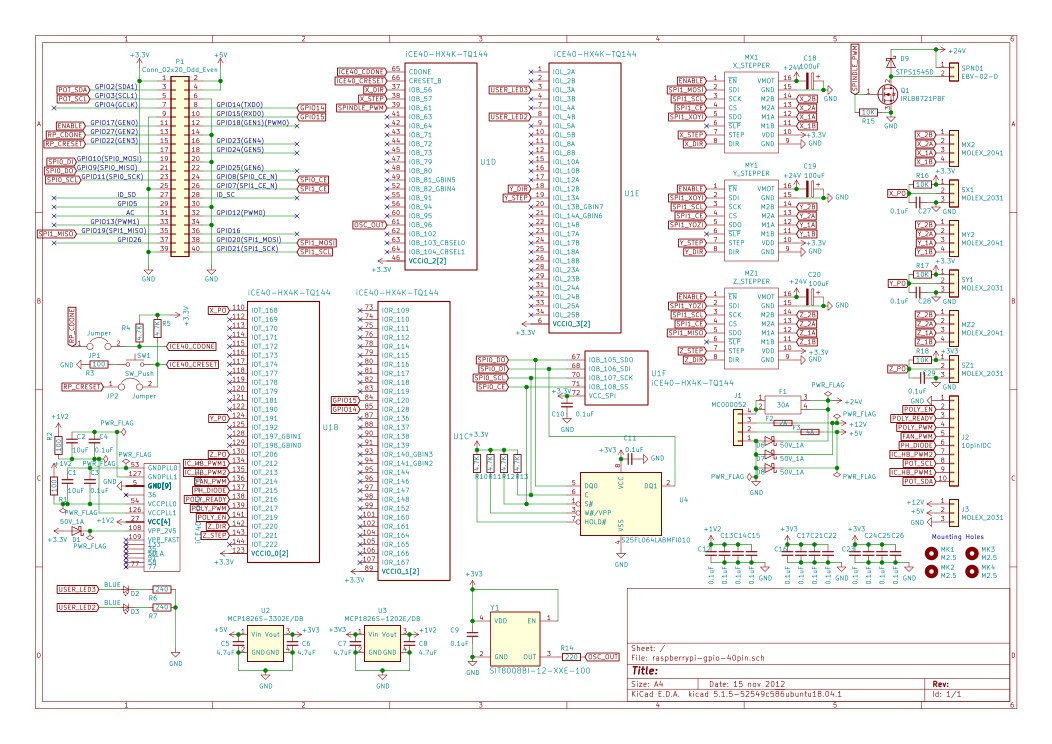
I just finished routing the hat for the Raspberry Pi with uses the ICE40HX4K. This chip comes in a TQ144 package so is easy to solder. The chip is also quite cheap, around 5 euro's. I was able to reuse a lot of the design of the beaglewire and icecore. Information for the laser controller is streamed to the chip via SPI. Maybe in a later stage, I will use the SDIO connector which is faster.
Schematic is shown below, full design available here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
true... dma (https://en.wikipedia.org/wiki/Direct_memory_access)... would be an interesting option as well... thanks for pointing it out.
Are you sure? yes | no
If/When you need more transfer speed then it may be easier to write a driver to do DMA using GPIO rather than trying to conform to how SDIO functions. Just letting you know that there are options.
Are you sure? yes | no