 Adam Gulyas
Adam GulyasOne method of creating micro sized nano robots uses tiny droplets of ferrofluid. To make them, the NanoRobotics Club at the University of Alberta had previously used a microinjector, something that is not built to handle these volumes of fluid well. This new approach seeks to improve the diameter of the droplets we can create.
The picture to the right shows a droplet made with the microinjector, submerged in silicone oil. It is about 400 um in diameter.
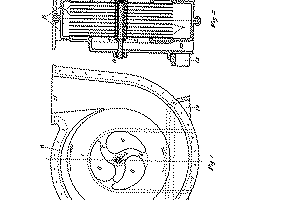
The device I hope to build uses two linearly actuated stepper motors, which push the plungers of small volume syringes. One syringe is filled with oil and the other with a water based ferrofluid.
When something drips from the tip of a spout, its size is determined by the balance of forces between gravity and the inclination of fluids to cling to surfaces. The oil rushing past the ferrofluid should decrease the clinging action and induce the droplet to leave the needle faster, resulting in a smaller droplet.
After this project is completed, I hope to expand research into the effectiveness of different ferrofluids to act as micro object manipulators.


 Radu Motisan
Radu Motisan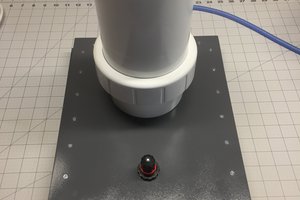
 Andrew Mayhall
Andrew Mayhall
Are you sure you need linear steppers or servos, and that they would work? I usually see syringe pumps (even on here) using regular rotary motors and leadscrews. Leadscrews can be very precise—they're what's usually used in micropositioners. If you need super-fast actuation, you could instead use hard drive head-positioning voice coil motors, connected via a connecting rod or similar.
Or you could use a leadscrew for the slow motion (i.e. moving the plunger to continue to apply pressure as the liquid is depleted) and do the fast droplet-ejection pulses using a second actuator, such as a piezo stack between the leadscrew and the plunger, or a hammer that hits a membrane on a second liquid-filled chamber that communicates with the syringe and the nozzle. I think the latter is probably better, because it circumvents syringe plunger stiction, at least for the droplet ejection. You might be able to take up the pressure pulsation caused by syringe stiction using a second more flexible membrane, and somehow (acoustically) route the pulse from the hammer membrane toward the nozzle. Or just get rid of the syringe altogether and use one soft membrane with a leadscrew for slow pushing and a stiffer one with a hammer for ejection.
Also, maybe look at the mechanisms that inkjet printer heads use. Might be hard to replicate without industrial technology, but might inspire something easier to make.