 Carbon
Carbon65C02 Single Board Computer (6502sbc):
- Designed around the Rockwell 65C02 microprocessor and equivalents
- 32k x 8 bit SRAM
- 32k x 8 bit flash non-volatile storage ("ROM")
- 16C550 UART (FTDI and standard modem interface)
- Power On Reset (POR) monitor circuit
- Complex Programmable Logic Device (CPLD) ("glue logic")
- Twenty pin expansion header (XPAN) supports up to four external devices
- On-board 5V power supply
- Parallax BoE-bot chassis-compatible PCB footprint
Dual Channel Servo Control Board
- Drives two hobby-class servos
- Provides 256 discreet steps per servo
- Built entirely from discreet 74HCxxx logic ICs
- Uses standard 6502sbc XPAN expansion header
- User controlled status LED
Eight Channel ADC Board
- Provide eight 8-bit analog-to-digital conversion channels
- Built around Texas Instruments ADC0808-N ADC
- Uses interrupt to signal 'data ready' condition
- Multipurpose but designed for use with Pololu QTR-8A Reflectance Sensor Array
Also has a 2.5AHr lithium-polymer battery pack. Currently unconnected as I'm taking the whole project apart on a regular basis to test things.
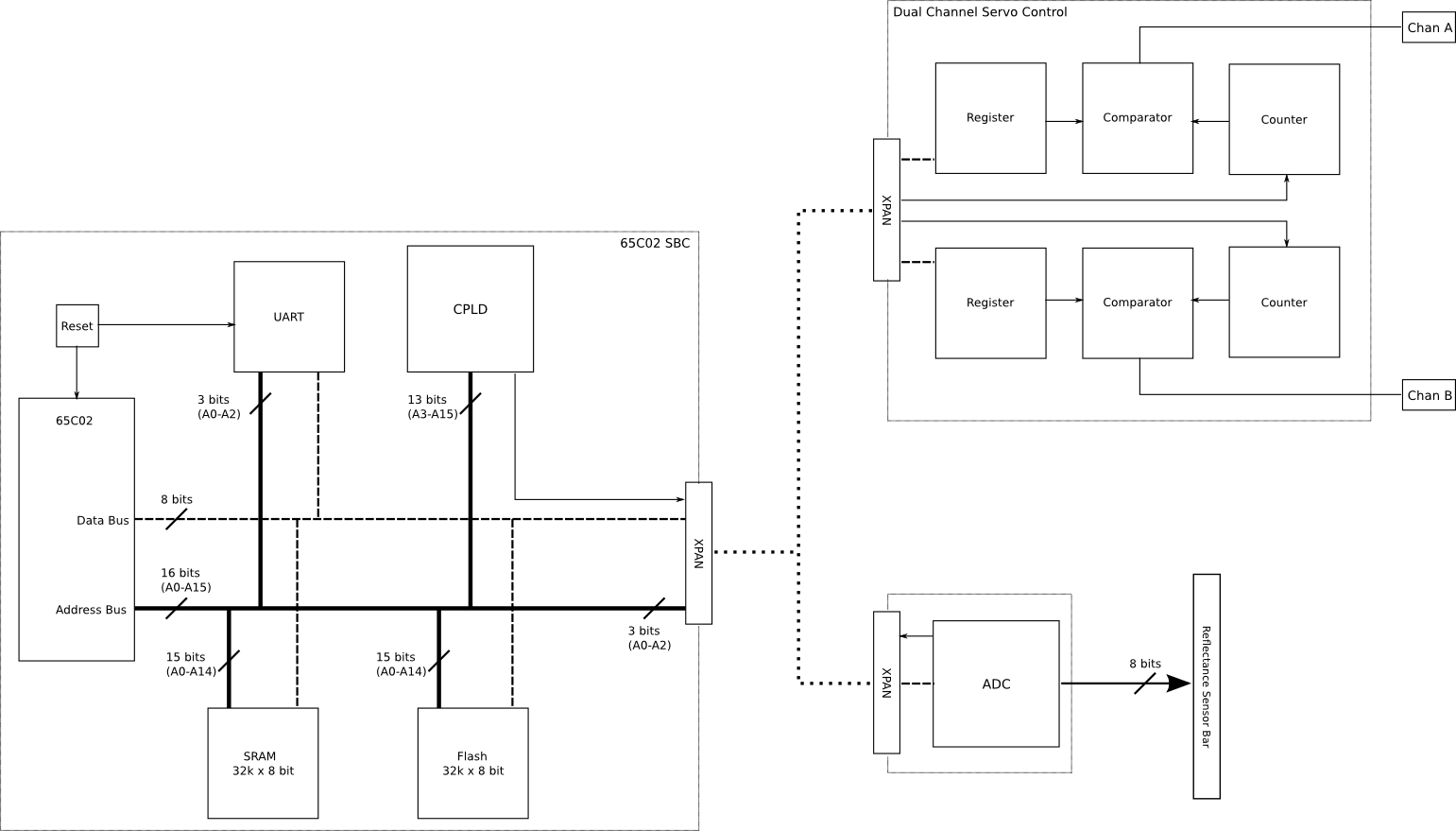
Simplified block diagram:
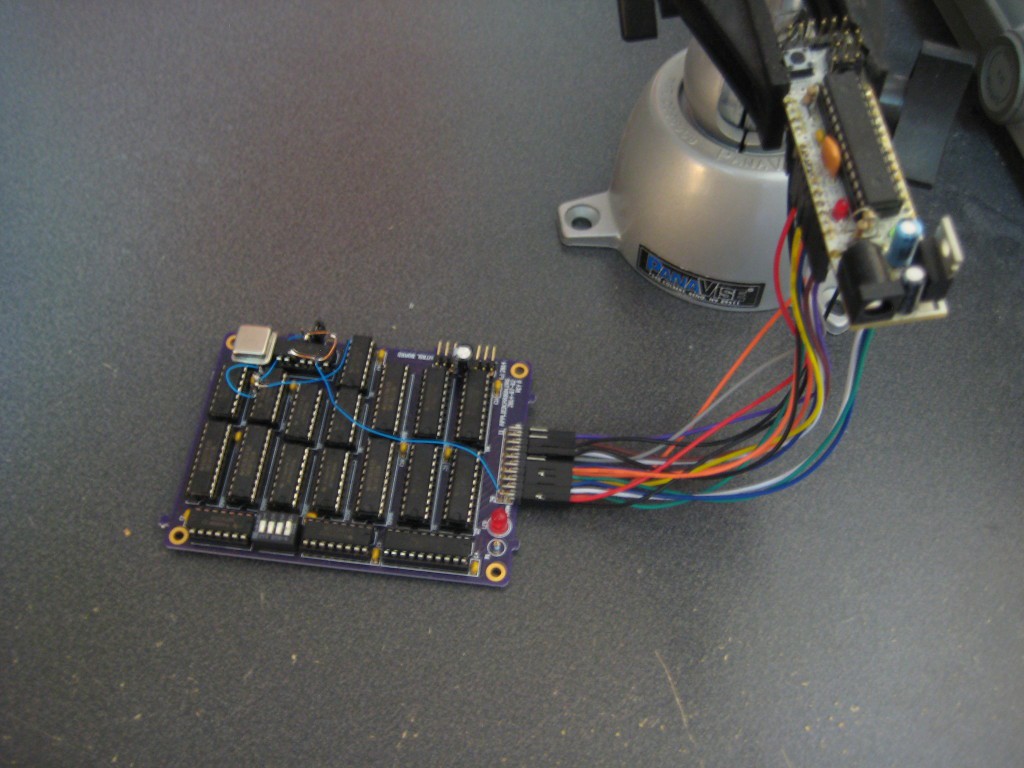 PanaVise FTW.
PanaVise FTW.



 matseng
matseng
 Keith
Keith