Alex
Alex-
Day 6: Every Day I'm Bubblin'
08/18/2014 at 00:27 • 1 commentI decided it was time to get the bubble sensors working. I started by changing the main loop to write the onboard LED with the state of the photosensor to aid debugging. This led me to notice something I've suspected for a while: the main loop is way too long (I'd estimate maybe 200ms; I don't have a scope or anything to measure with). I refactored a few things to fix this:
1. I ripped out my photointerrupter debouncing, edge counting code, and replaced it with built-in interrupts.
2. I changed the main loop to only update one analog sensor each time through the main loop, rather than reading from all four each time. It still reads each sensor a bunch of times (currently 4) and averages them together. If I need to make it even faster, I could probably speed things up by doing only one read per loop, and updating the value at the end of 4 iterations. But this seems to be fast enough for now.
In the process I noticed that I wasn't actually reading from the LM35 sensor before (I was reading from the TMP36 twice), whoops. I fixed that, and I'll collect some more sensor data, but this brings up an interesting question: why is it that the first time I read from the TMP36 it's super noisy, but the second time it's not? Still, it may be a moot point, because the LM92 is producing great results... except when it stops responding for no reason. I'll keep an eye on it.
Then I got started figuring out how to get the photo sensor to detect bubbles. My first thought was to add food coloring to the water. I experimented with green, blue, and yellow food coloring, and all three combined, but despite being very visually opaque, it apparently stayed pretty much IR transparent. I guess I experimentally confirmed the results here (which I was hoping were wrong, but no luck): http://www.av8n.com/imaging/dye-spectra.htm
I realized there are many easier things I can adjust than the absorbance spectrum of the water. The next thing I tried was cutting power to the LED in the sensor by a factor of 5 by swapping out the current limiting resistors. While this didn't completely fix the problem, I did notice that there was a particular position on the airlock which caused the sensor to trigger. A little more careful fiddling led me to discover a point where I could attach the sensor which does seem to detect passing bubbles, even with normal (transparent) water. Once I get my hands on a hot glue gun I should be good to go.
-
Day 5: Temperature Sensor Showdown
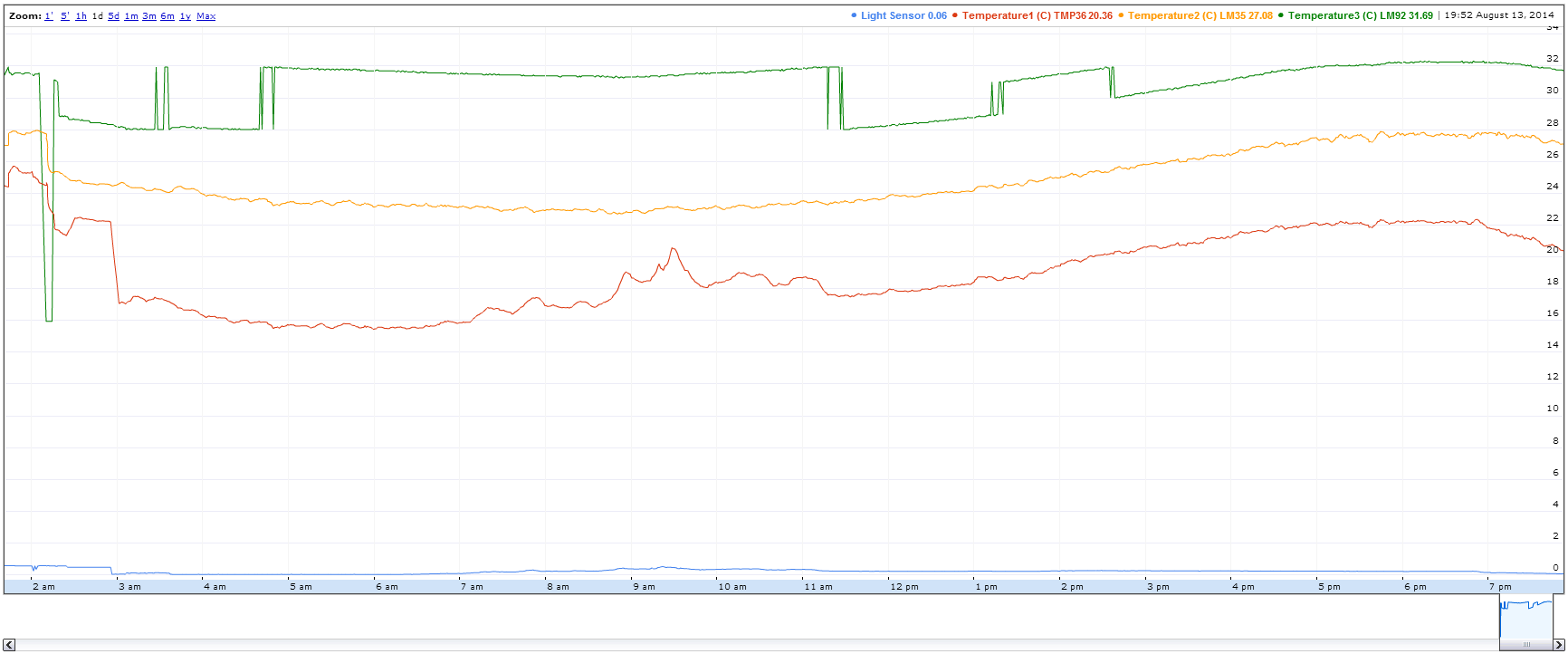
08/13/2014 at 09:20 • 0 commentsI got a couple of new types of temperature sensors: LM92 (2-wire) and LM35 (analog). The LM35 was a drop-in replacement for the TMP36 I was already using, so that was easy enough. The LM92 required a bit more finesse, and learning about the Spark core libraries. I eventually found the built-in I2C library, and with some finagling eventually got it working. I'll leave it logging temperatures for the next 24 hours or so so I can get a good comparison. My initial impressions are:
1. The LM35 is a big improvement over the TMP36 in terms of noise. It might be enough to just go with the LM35, since it's super easy to use.
2. All three sensors are relatively self-consistent, but have huge amounts of error between each other: the TMP36, LM35, and LM92 think it's 25C, 28C, 31.5C respectively.
3. Comparing against my IR thermometer and the thermometer in my clock, the LM35 seems to be the most accurate so far. That makes it the most accurate, easiest to use, most reliable (LM92 doesn't always come up correctly on the bus, not sure why), and it uses the fewest pins. I'll collect data overnight, but so far it's looking like the LM35 is going to be the winner here.
~
18 hour Update:
I found a boolean math bug in my Spark code around parsing the LM92 results, which caused the graph to look like this:![]()
I fixed the bug (I think). Maybe that will help the error margins. Other than that, the new sensors are looking good. (Note that while the TMP36 and LM35 have smoothing and the LM92 has none, the LM92 is still the smoothest.)
-
Day 4: Photointerrupters
08/01/2014 at 09:18 • 0 commentsI finally got started working on the bubble counting circuit: a photointerrupter mounted across the bottom U-shape of an S-type airlock. First I wired up the photointerrupter to the Spark core and verified that I could take readings from it. I wrote some code to poll the photointerrupter rapidly, including some debouncing, and export the results through the same REST API call. Now the results show up on the graph, as expected. Next I tried mounting the photointerrupter on the airlock, but bubbles in the water don't consistently trigger the sensor. I'm planning to experiment with various food dyes to see which are most IR opaque. If that fails, I'll go back to the previous type of airlock, plus some black electrical tape to break the beam. (Later I found out how to write interrupts on the Spark core, so I'll change that later.)
-
Day 3: Temperature Data Quality
08/01/2014 at 09:14 • 0 commentsI set up my spark core to log for several days and graphed the results. The data coming from my temperature sensor was very noisy. I added some filtering caps, but to no avail. After examining the datasheet more carefully I discovered that a +/- 2 C range is normal, which is much greater than I would like. I ordered some new sensors which should have a +/- 0.33 C variance at room temperature, which should give much better results.
-
Day 2: Logging
08/01/2014 at 09:12 • 0 commentsOn the second day I worked on my first Spark core app. It read data from an analog device (a temperature sensor, in this case) and exported the data through the native REST API. Amazingly everything worked fine on the first try. Then I set up a Google spreadsheet to put the data into, and set up a script to automatically pull data from the Spark core periodically. Within an hour or two I had everything working satisfactorily, which is pretty cool.
-
Day 1: Hello World
08/01/2014 at 09:09 • 0 commentsOn the first day I set out to figure out how my spark core worked. I set up the spark core, figured out how to connect it to the wifi (it needed a factory reset), and figured out how to do basic I/O.
Heimdalr, Multi-Mead-Watcher
A low-cost monitor for many simultaneous fermentation vessels.