 praetorian
praetorianSensors I'm considering adding for obstacle avoidance and guidance will likely include:
- Laser scanner - 3D camera (Xtion, Kinect or similar)
- Ultrasonics
- Optical range sensors
- Full colour camera (to identify objects) and remote teleop
- GPS for larger properties
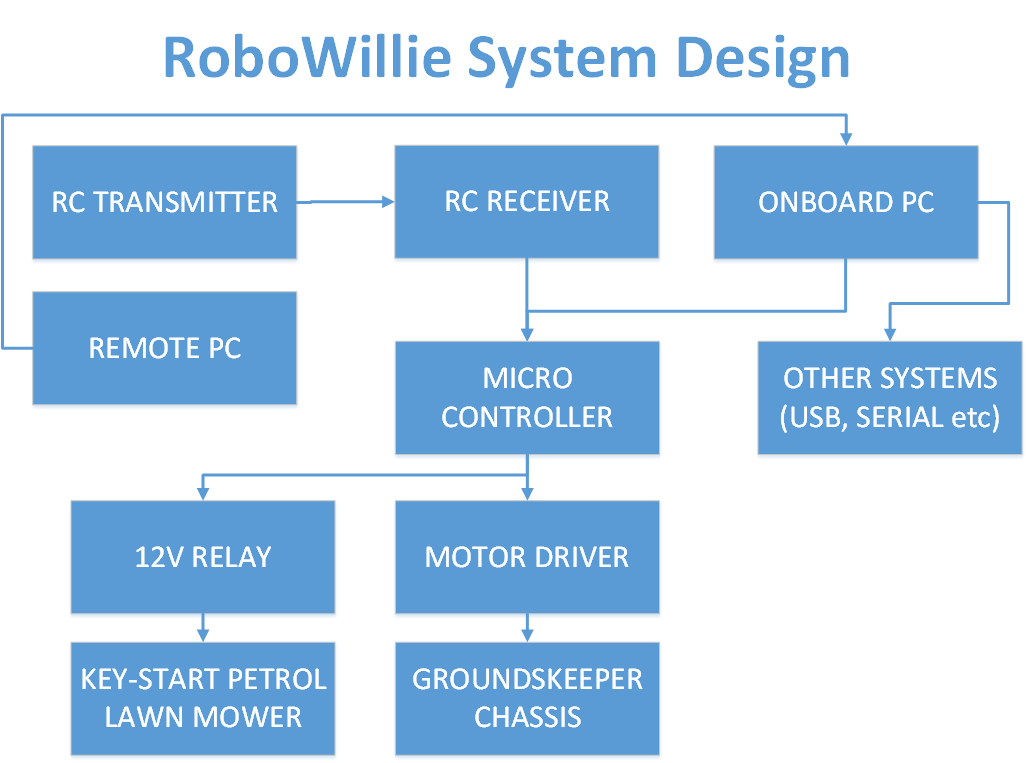
To keep things simple I am starting with just the lawnmower over RC, but I really want to make the bot modular and control it via ROS so that it can perform other task around the yard autonomously. For some actions, in the interest of safety I am going a semi-autonomous route.
ROS is the Robot Operating System (http://www.ros.org/) this has good support and I've already got experience with it, making it a great choice over other solutions such as an Arduino or Pi for the computing side of things.



 Mister Malware
Mister Malware
 Rudolph
Rudolph
 SapoRano
SapoRano
 Martijn
Martijn