On Bolts:
You know what's good for bolting stuff together? Bolts. 1cm diameter steel bolts, lots of them.
The chassis design is simple: Two carbon fiber plates with 8 evenly-ish spaced matching holes in each. They are connected with 1cm wide steel bolts, with nuts acting as a sort of spacer to hold the plates apart.
It's stable enough that I could stand on it and jump up and down without any fear of damaging it.
On Boxes:
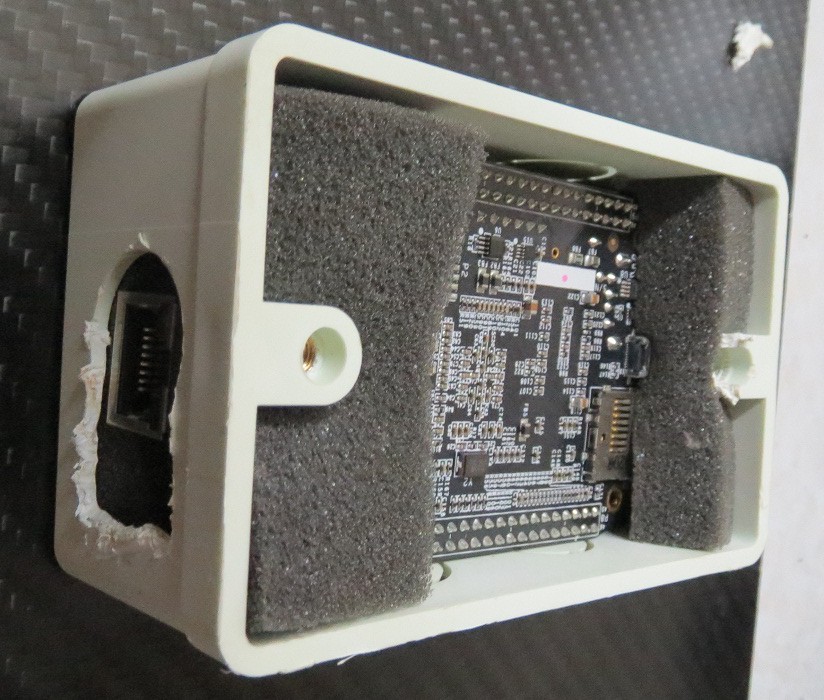
The Beaglebone black happens to fit nicely inside a plastic lightswitch box. The holes in the box line up reasonably well with the power input, the ethernet and usb ports (a little cutting required). This keeps and stray wire from... interacting... with the most expensive component. Not shown is that there is in fact some space left free underneath for thermal reasons.
On Wheels:
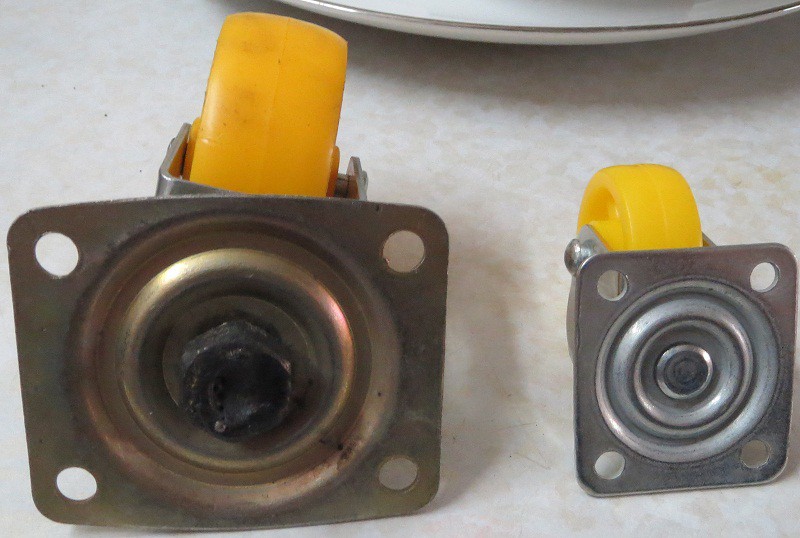
Office chair wheels are pretty great. The have a mounting bracket, if used right this keeps your steering servo happy. They turn on an axis. Heck, the ones I found even have ball bearings!
The only problems are, too many of the parts turn freely relative to each other and it's hard to mount it to a servo.
If you want torque applied through the top to actually turn the wheel, you need to apply cyanoacylate then 2-part epoxy glue to some parts of the mechanism. They have a wide surface area in contact, so this works reasonably well.
The more difficult problem is attaching a cheap servo to it to turn the wheel, steering the robot. I tried arc/spot-welding a bolt to the top of the piece, which I could then cut to fit a servo horn. This was quite solid and worked for a while, but damage to the ball bearings from the welding heat made the part unreliable.
Careful welding should still work, but finally 2-part epoxy can just glue that cut bolt into place... although a better solution is proper rack-pinion steering.

A final note on this: sanding the wheels a bit and applying a thin coat of silicone (the cheap tube of rubbery sealant stuff) should improve traction.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.