 Nicholas Stedman
Nicholas StedmanOverview:
At SIGGRAPH:
Simulating in Python, and using Genetic Algorithms to develop gaits:
Touch-responsive snake-like robot
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Overview:
At SIGGRAPH:
Simulating in Python, and using Genetic Algorithms to develop gaits:


This is a really cool robot! I'm building a touch-sensitive human-interactive snake as well. Would you mind sharing an info about how you did capacitive touch sensing? I'd love to learn what went well and what you'd do differently.

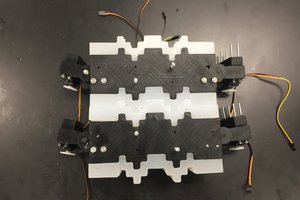
Sorry, this is a reaaaally late reply! There's a samd21 driving each module. I use the built-in cap sensing. In this older version there is foil on the inside of each node that does the sensing. In the most recent version the sensing pad is on the surface of the robot as a design feature.
This is really cool, was it 3D Printed on with FDM? Do you have any of the STL or STP files to share, I think this would make a great pet for the office.
Hi Peter, I've done a few versions on different printers. Most FDM, but also tried polyjet, and sls (through shapeways). The one pictured here is sls. I have some more work to do before releasing the files. Will post here when ready.

This robot seems innovative to me, though my experience with robotics is limited. I compliment you on the sensory and emotional nature of the robot and I'd love to get one for my Mom! Or better yet make one! Please see #Ivan the TeamBot
Les
p.s. I heart capacitive sensors!
Hi Les, Thanks for the support. I hope to finish...one day. Ivan is awesome...I see the similarities, but your design is very cool with the internal gears.



 Arick Sweitzer
Arick Sweitzer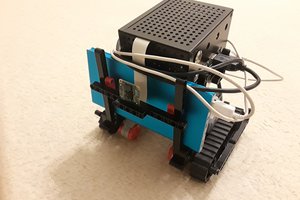

 Saul
Saul
 Alberto
Alberto
I love the idea of a robot that sits on my shoulder and gives me hugs.
That's all it would need to do, and I would love it and cuddle it all day.