 Jarrod
JarrodAt first when I hooked up JTAG things were not looking great, I was getting strange debug errors, so I tried debugging an instaspin enabled launchpad, which worked perfectly and realised I'd forgot to order the "F" piccolo part, ie I'd gotten the piccolo without instaspin built into ROM. The launchpad was sacrificed and the gods were pleased.
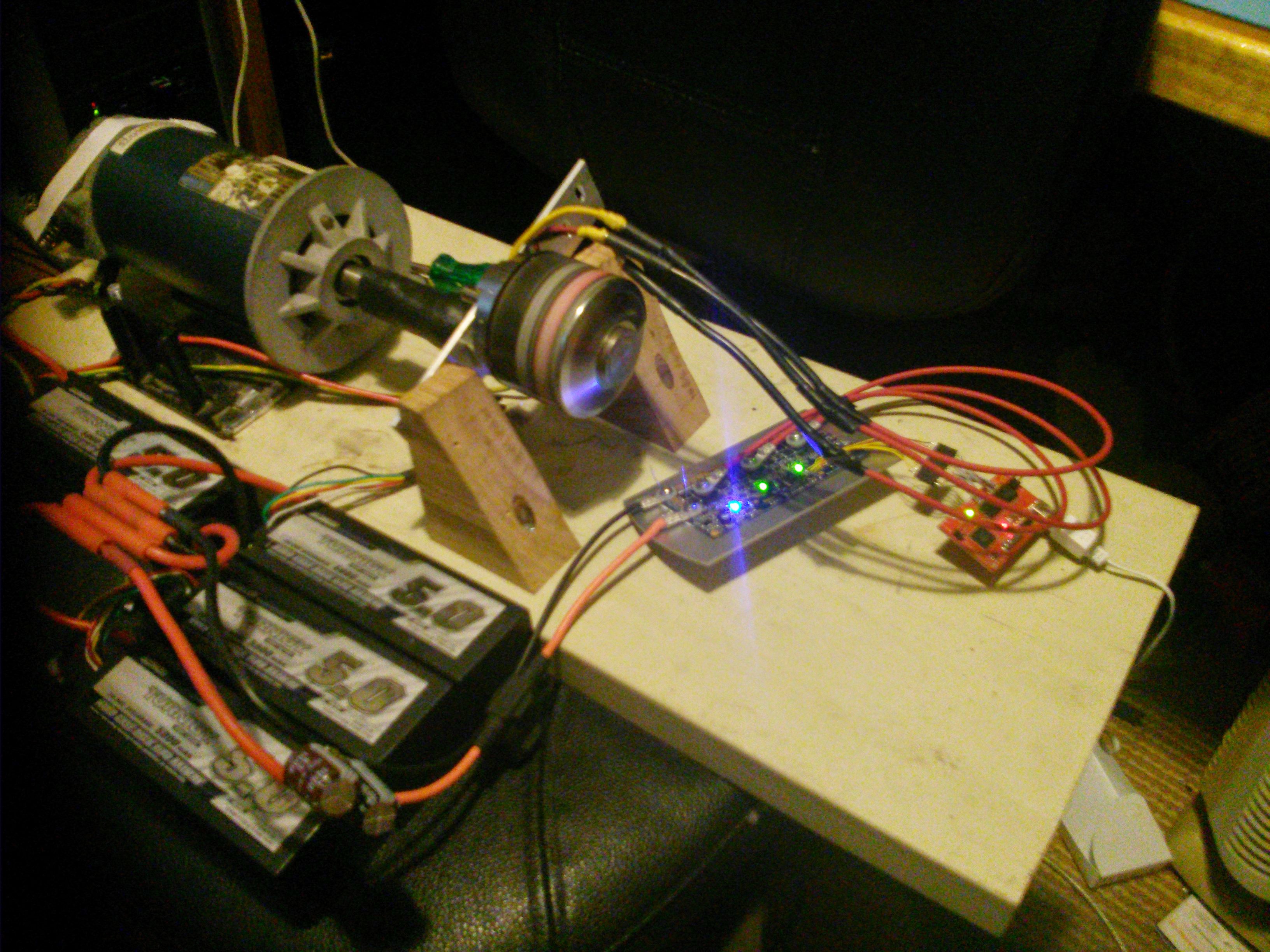
So I started off running lab 2b from the motorware lab project set, this lab is intended to run the FOC from flash and do the motor ID process before running the motor with a PID speed control loop. The motor ID process is crucial, it does a DCR measurement on the motor, then spins it up open loop and modulates the stator current to do inductance and flux rating measurements, these parameters are required for the flux estimator to work correctly. On the old V2 hardware I could never get it to complete the ID process without the rotor stopping mid measurement, or doing other unusual shuddering etc, this was a good indication that the controller was getting noisy current and voltage signals which I now believe to be crosstalk between the two (due to ground loops.)
This time the controller ID's and runs the motor up to full speed (4KRPM@48V) very smoothly, startup and low speed operation is perfect. Very promising result for the new board layout.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.