 Pascal Roobrouck
Pascal RoobrouckMooov is CNC Motion Controller, a piece of hardware/software controlling the motors (Stepper motors or Servo Motors) and peripherals (Spindle, Coolant, Vacuum, Dust control, ..)
What makes Mooov unique ?
- runs on low-cost, easy available hardware
- high-quality trajectory and speed control
- simple design for high reliability
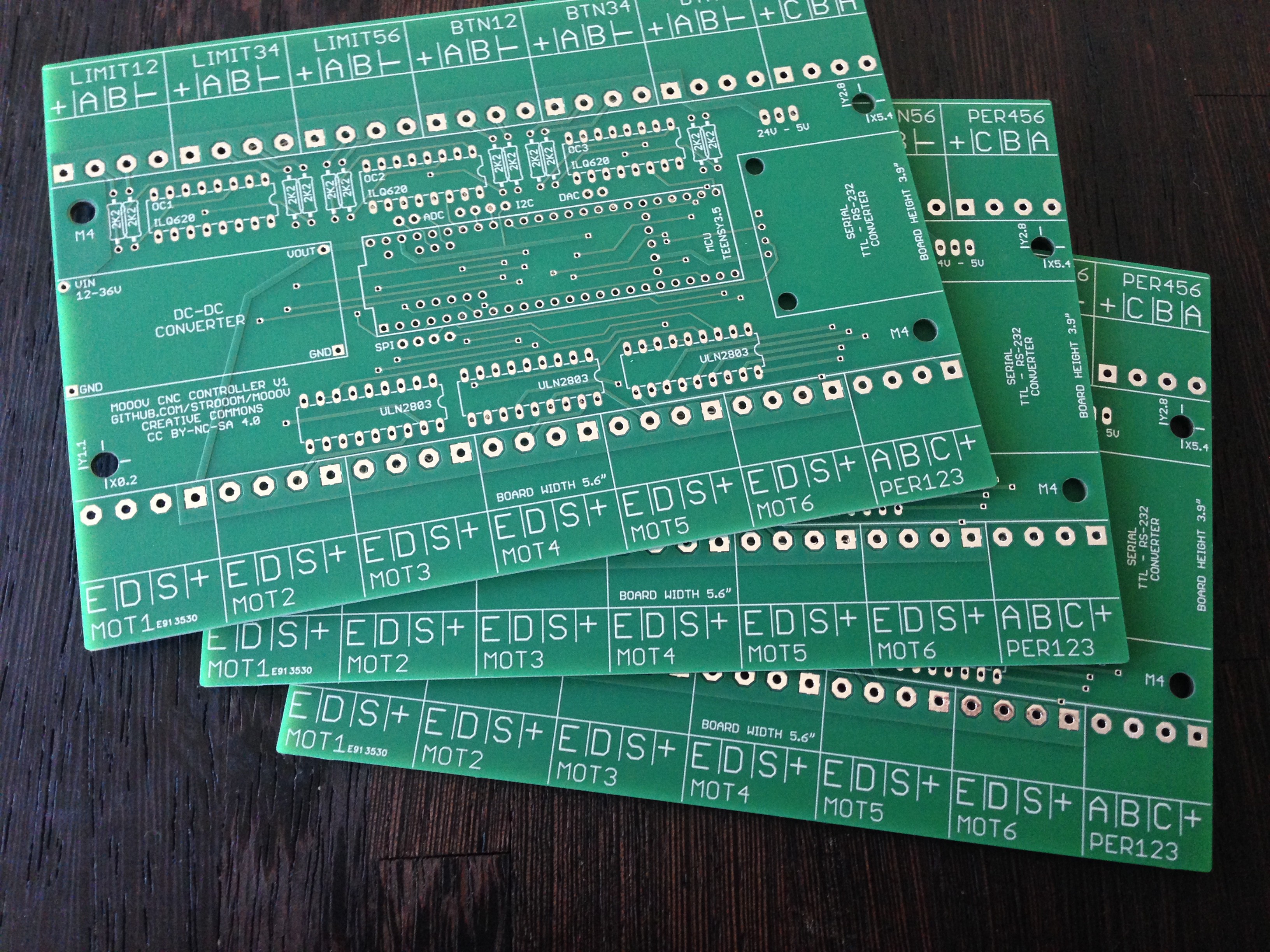
Hardware
Many existing CNC controllers run either on an Arduino, or on a Linux PC.
The Arduino is very low cost and available everywhere, however it is limited in ROM, RAM and CPU throughput.
A PC has much more resources, but this platform is not designed for real-time processing and as such it is difficult to achieve accurate control of the motors.
ARM-based uControllers, such as the Teensy provide a good compromise : plenty of HW resources for a reasonable cost and true real-time performance.
Trajectory and speed control
Moving the CNC along the correct path, at the correct speed requires lots of calculations. Todays uControllers allow to do accurate 6 axis linear and helical movement. At the same time they allow for higher-order speed profiles, optimizing the forces, speed and acceleration of the machine.
Complexity - Reliability
Mooov focuses on doing 1 thing only. We stick to the 80/20 Pareto 'rule'. The advantage is reduced complexity and improved reliability.


 Mrinnovative
Mrinnovative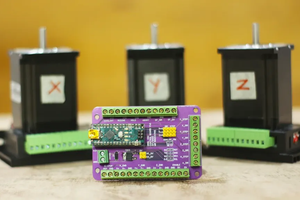
 sandy
sandy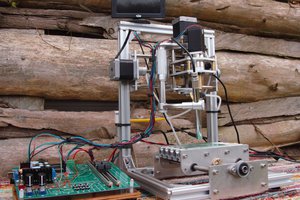
 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠
 Troy Cundy
Troy Cundy
Has any of the software for this project been published? I have looked on GitHub (https://github.com/Strooom/Moovr) but I am only finding hardware documentation.
Thanks