 maks.przybylski
maks.przybylskiGit hub repository with our code
Project was created during Basics of Mechatronics laboratories at Akademia Górniczo Hutnicza in Kraków.
Team: Sylwia Buczyńska, Maksymilian Przybylski, Andrew Popiel, Aniela Oprządek
How it is done? (by the robot)
1. The robot enters the maze !
2. The sensors scan the surrounding area and send appropriate signal to the motors.
3. It uses a right-hand rule to exit the labirynth
(As it is our first project in genral, we mostly focused on completing the task (before uni deadline) and time was not a priority.
4. The whole maze is being printed out in a console
5. Everyones happy
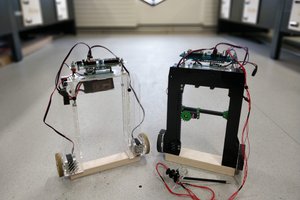
CONSTRUCTION
The construction revolves around the RoboCORE as it is the largest component and quite difficult to cope with. Once we connected motors to the RoboCORE using a frame , we proceeded to work on a transmission. Since our robot had to be sensitive enough for detailed paths, we opted for a reducing transmission. Although, we do have in mind that our robot was supposed to be the fastes in the LABirynth we prefered for it to complete its mission.
Later the robot was rebult quite some times, the main issues that we faced along the way was:
* for the wheels to remian perfectly still, and not chge its position despite traveliing some distance
* as well as our 2 driving wheels, we added 3 supporting (Idle) wheels, much like those in a supermarker cart, the purpose of the was to keep the robot stable and make it possible for it to rotate freely
* simillary the sensors had to be place in a specific, fixed position, keeping in mind that both the motors and sensors had to be connected to the RoboCODE by a cable
* our robot might be slightly overbuild, but that increases its mass, which might be a good thing for a begginers robot
PROGRAMMING
As we were using the RoboCORE specific function provided by the manufacturer had to be used. The biggest problem that we encountered along the way was actually connected with building and flashing the code onto the CORE. However, we have learned on our mistakes, have not given up, transfered all of the drunk energy drinks into a working code.
As written before the step by step tasts of the robot to perform was to:
a) scan the surrounding walls several times
b) give the median value as a return
c) perform a step function or a turn function accordingly
d) in the meantime save its current position
e) print out the outline of the labirynth
What was also an issue, was callibrating both the sensors and the motors. To be honest RoboCORE is not a working freindly device, as we sometimes felt like moving in a circle as every other change would lead us to the beggining phase.
CONCLUSION
All in all, we have spend quite some time in the lab and hope to one day optimize and futher impove our very own project. Though it might not be the greatest it has the bones to become the great beast.
 Ben Peters
Ben Peters
 Will Donaldson
Will Donaldson
 Ted Huntington
Ted Huntington
 EK
EK