Acceleration sensor allows robot to find his start-point angle, meanwhile gyro sensor takes part in all further calculations of angle change that occur after robort begins to balance. Calculated this way angle is taken as variable to the PD regulator, that returns required acceleration signal that goes on the motors.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Malte Ahlers
Malte Ahlers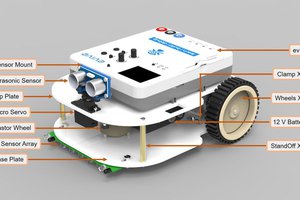
 evive toolkit
evive toolkit