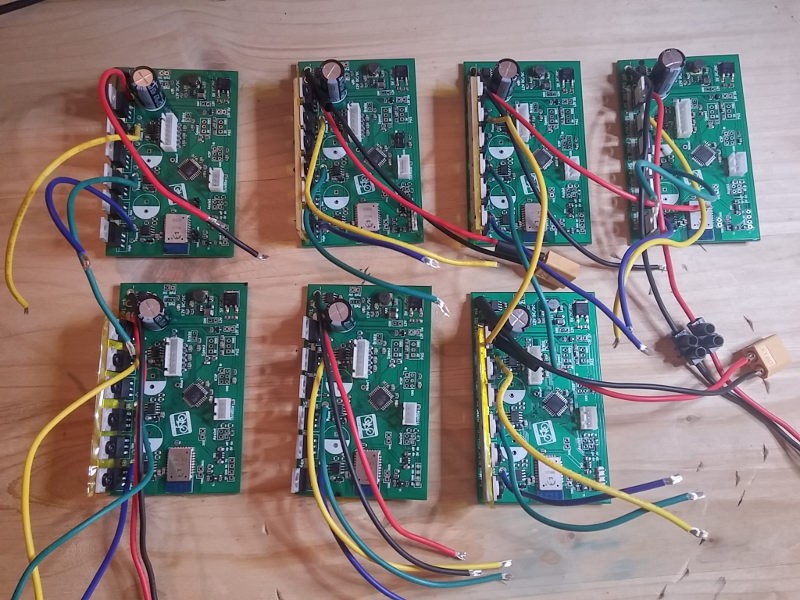
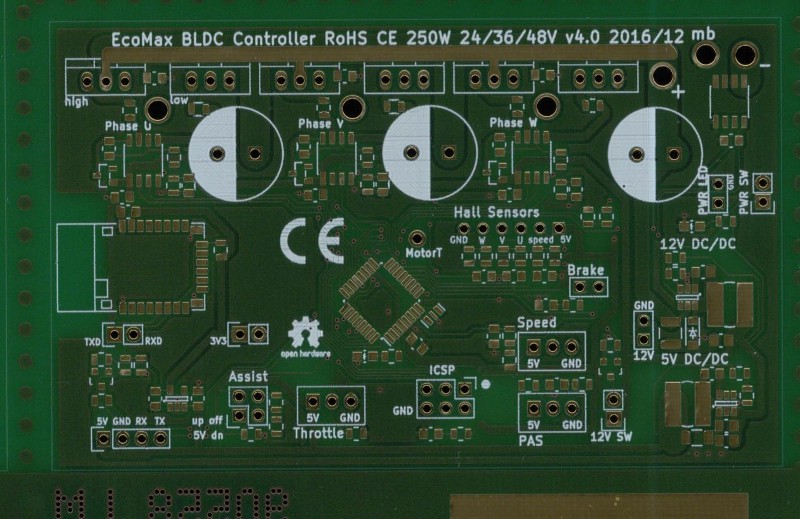
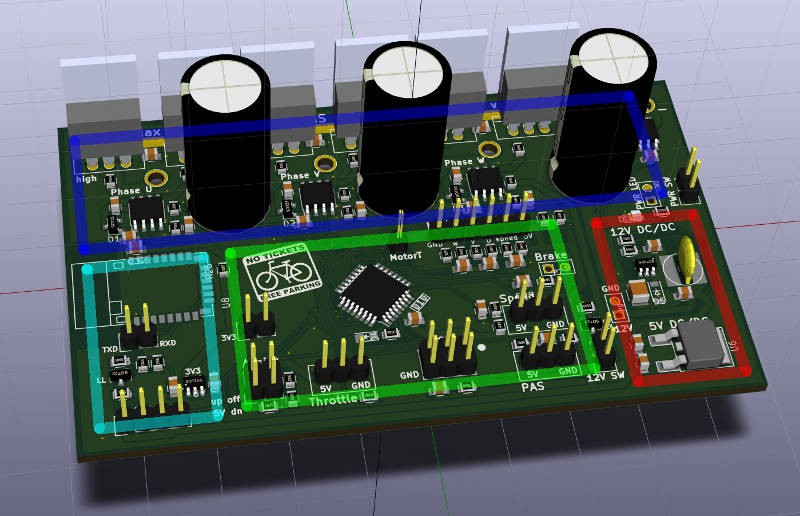
Key specs of the controller:
- 250W-1000W power output
- 36V/48V operation
- Texas Instruments switching DC/DC converter / buck regulator
- output for light
- bluetooth configuration
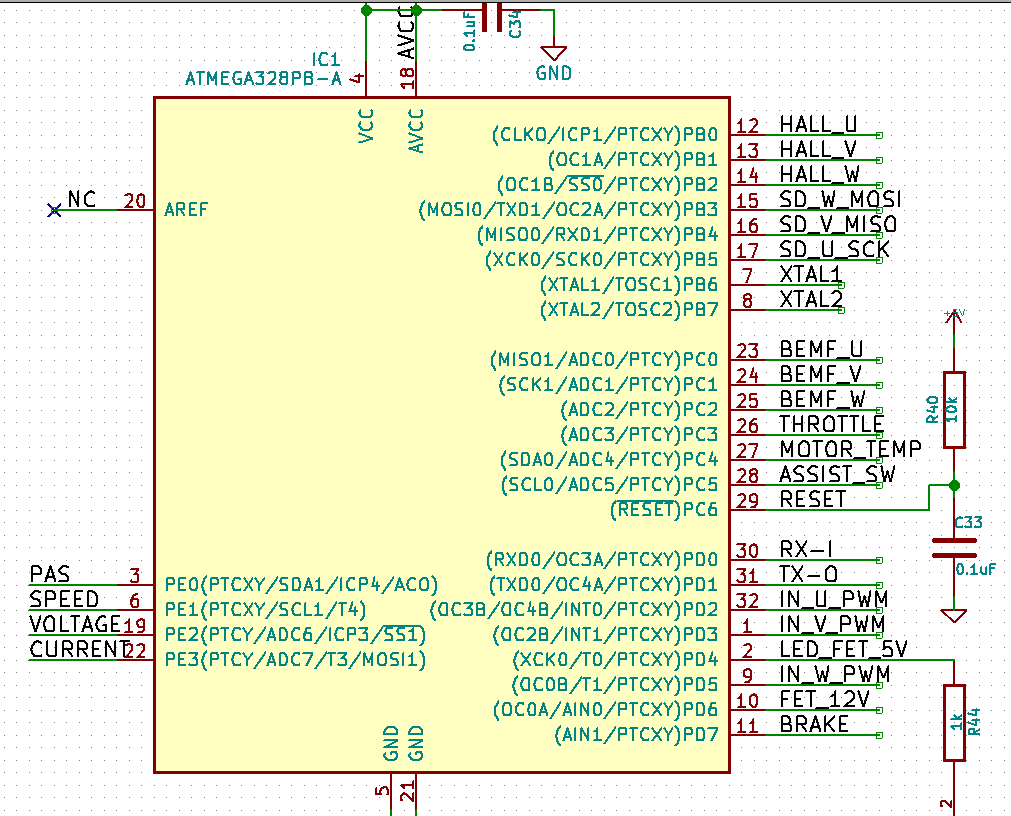
- connectors for throttle, pedal sensor, speed sensor and brake interrupt
- regenerative braking
- switchable power assist levels
Specs for the Android App
- settings for max speed, wheel diameter, motor type etc
- display speed, amps, battery voltage, power consumption
- diagnostics - check hall sensors, brake sensor etc.
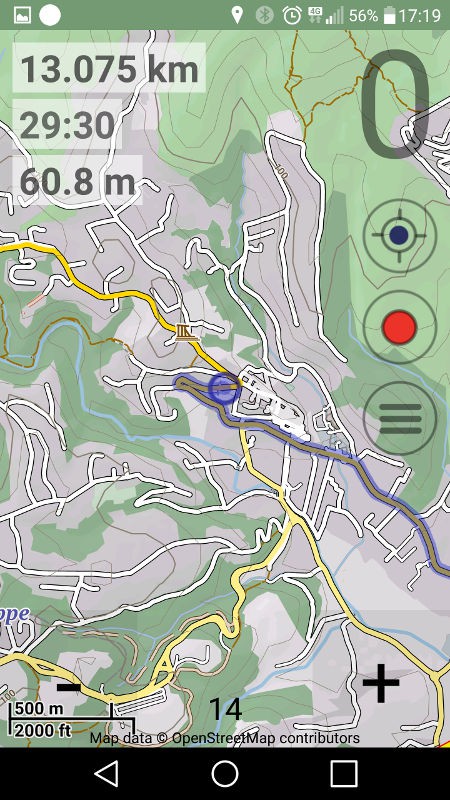
- gps track logging with electrical data
- easy upload of trip data to website
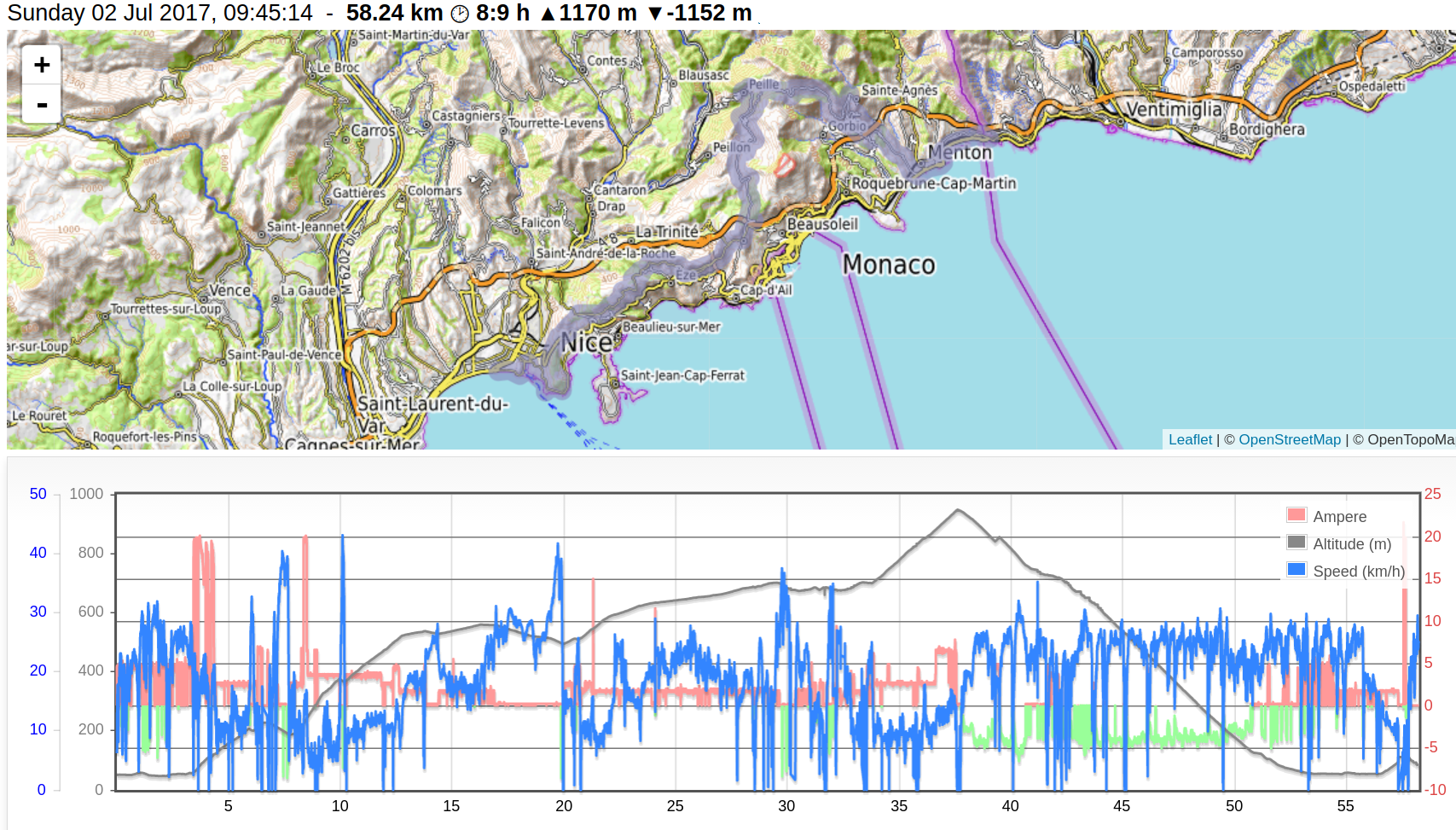
Website for viewing / sharing trips. An example trip with electrical data is here.
Specs for yourself and the environement
- bicycle usage improves health
- the environment is happy: a small car uses 5l fuel per 100km (=56 miles per gallon). A liter of fuel contains about 10KWh of energy. An electric bicycle uses about 0.5KWh per 100km. Thus about an espresso cup of fuel or 5600 miles per gallon.
EBikes are fun, good for your health and good for the environment! You should join the revolution...
















 mauswerkz
mauswerkz
 Sci
Sci
 Jarrod
Jarrod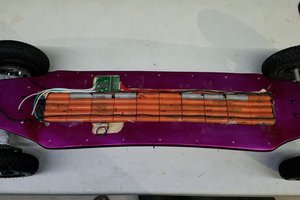
 Daren Schwenke
Daren Schwenke
very helpful: can you please share firmware