hornig
hornigThe Problem
Minutes matters. There are situations where people get in danger through no fault of one's own like hiking a mountanious trail and getting surprised by changing weather conditions and requiring help. Then is when search and rescue operation teams come at play and one of the first things they try to do is locating you. Normally SAR teams can find you via your cellphone you are calling them. But there are remot places with limited coverage making it harder to locate you and finding you will take more time.
The problem indirectly arose from a similar problem the KSat-Stuttgart e.V. team had. They said:
"We need to find our rover in case it will be falling of from the REXUS sounding rocket. Our ROACH experiment will be flying on an suborbital ballistic trajectory in northern Sweden and landing in the snowy Swedish tundra. This is a remote region and even with the pretty good Swedish cellphone coverage, we cannot risk loosing our rover due to a failed location over SMS transmission"
So this object recovery problem made us aware, that when this is already time crititcal and if there are still regions and situations with lacking SAR infrastructure, we want to combine both tasks and do something against it!
How it works
Our approach is pretty simple: Have a beacon signal that can reach several ground stations. At those ground stations, the time of arrival will be determined and with this a classical trilateration will be done to position the signal's origin. The mathematics behind it all of us do in highschool. The challenging part is how to realize it with hardware that can be used at remote places because all those stations need to be connected.
Setting up shall be as easy as setting up a roadside pickinc, just several, and afterward you really collect all your trash:
- select 5+ locations for covering the area
- go there and place the station
- put power on
- they either mesh themselves, or you just collect the data at the end of the experiment
- let the station record the beacon signals and triangulat the position
- get the data and get help in case people need it
So for that reason this project has the "Experiments" attached to it because we will need to test it under real conditions. This is why we need you helping us with good ideas how to test and where to test. We already have 3 phases of tests and please send us more. You can add them on our Google Map. For now, we have the following...
Basic Principles:
While design the system we always kept in mind to have the following flexbility...
- mobility: place a ground station somewhere and have it running autarkicly on battery (and solar power if region allows it)
- independence: you want it working without it being connected to the internet ("go there and grab this hdd by hand"). It is an Internet-of-Things systems, but with very high latencies in mind! (time to collect each ground stations data and get it back for analysis)
- comfort: if there is internet coverage, use it but don't rely on it, stay independent!
- quick response: a fast imprecise result leading you to a living person is better than a slow precise result leading to more sufferring.
- the more you know: the beacon can transmit more data (health conditions, environment, last known GPS location)
- expect the worst: that is why we want to test the system as hard and as much as possible, on ground and even in very high altitude.
Setting up a ground station grid shall be as flexible as possible and sometimes you need it as soon as possible for a very specific task. So you need to be able to neglect one part of the configuration and still be able to locate the signal. As usual, minutes matter because people matter.
Test it like you fly
"Test it like you fly" is one of the many mantras you will hear in aerospace engineering. MoSAReX in its essence are great testbed for our Distributed Ground Station Network (on hackaday) that is meant for tracking cubesat. But while building it, we uncover further applications beyond space. With MoSAReX we have this kind of great purpose we love to test.
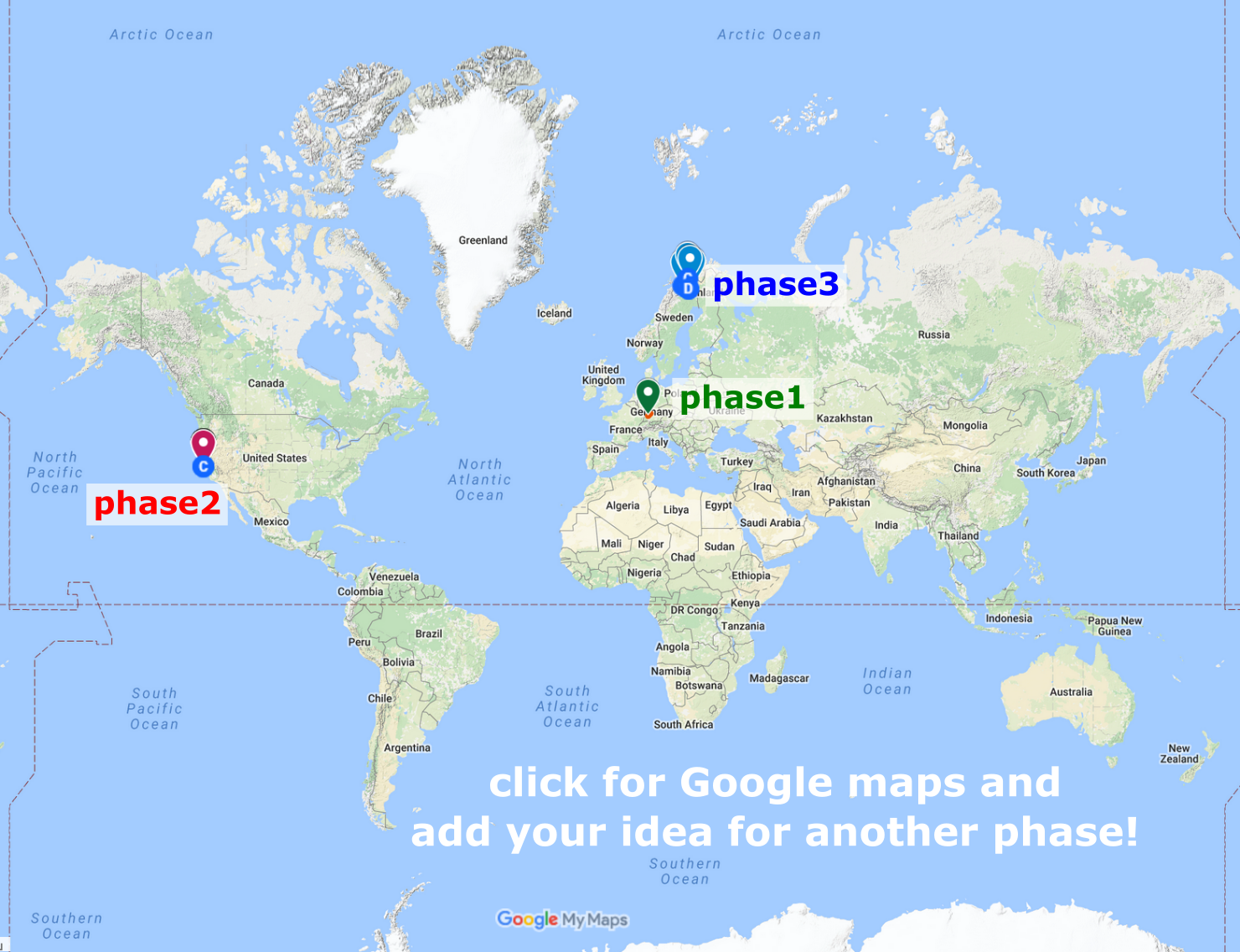
So we will do at least do 3 phases at different locations. Feel free to propose more on our Google map!
PHASE 1: Beacon Range (active...)
During the first phase, that we almost completed, we concentrated on the beacon. It will use typical Internet-of-Things frequencies everyone can use freely. For that we are looking into the ISM bands that are open for industry, science and medical. In short: those frequencies are open to be used by everyone without a special licencer and free of charges.
For getting a feeling of the range of our beacon, we sent an XBEE Pro 868 into near space and tracked the distance with a matching patch antenna. We achieved a distance of 66 km and it was only stoped by the small hills in our close vicinity that was blocking the view.
So 868 MHz is our baseline for the REXUS sounding rocket tracking going even further and of course way higher/faster. For other regions of the world we will take 433 MHz or the 900 MHz bands according to the International Telecommunication Union (ITU).
Below you will see the result of our "spaceballoon" experiments in phase 1.
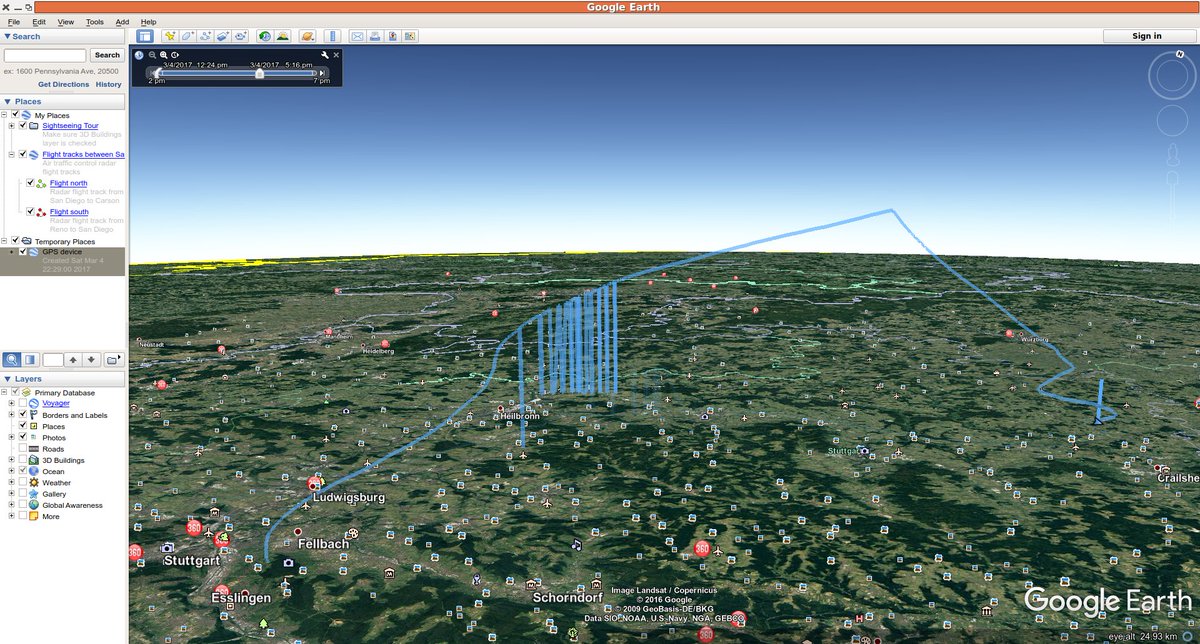 And of course we also needed to find the spaceballoon again, because we had spare space left and offerd a PhD team of the University of Bremen a hitchhike to do their stratospheric infrared experiment.
Collaboration is always great!
And of course we also needed to find the spaceballoon again, because we had spare space left and offerd a PhD team of the University of Bremen a hitchhike to do their stratospheric infrared experiment.
Collaboration is always great!
The next step will be the selection of better antennas by comparing different kinds of antennas.
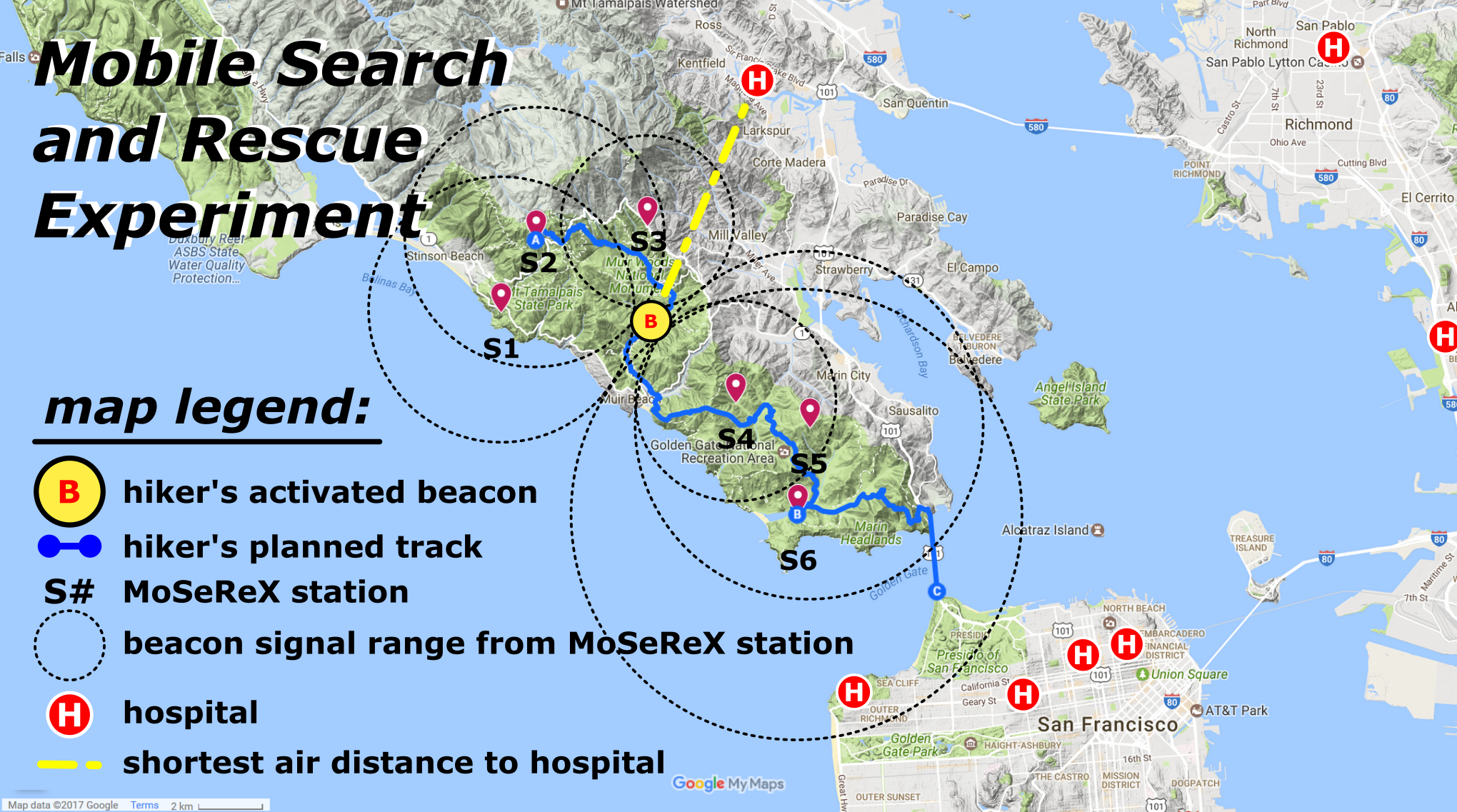
PHASE2: Muir Woods Hiking (planned)
Next will be to be a close range test on ground simulating a hiker during a trail in an mountanious area. In case he breaks his leg and needs help, the stations shall track the beacon within in an 10km x 10 km area. This is basically a "foxhunt" to track the beacon signal during it's run.
It doesn't need to be in Muir Wood, but we plan to be in San Francisco for the Google Summer of Code 2017 in Autum anyway, so we are happy to combine a visit to this gorgeous area with a test. We just like camping, hiking and being outide.
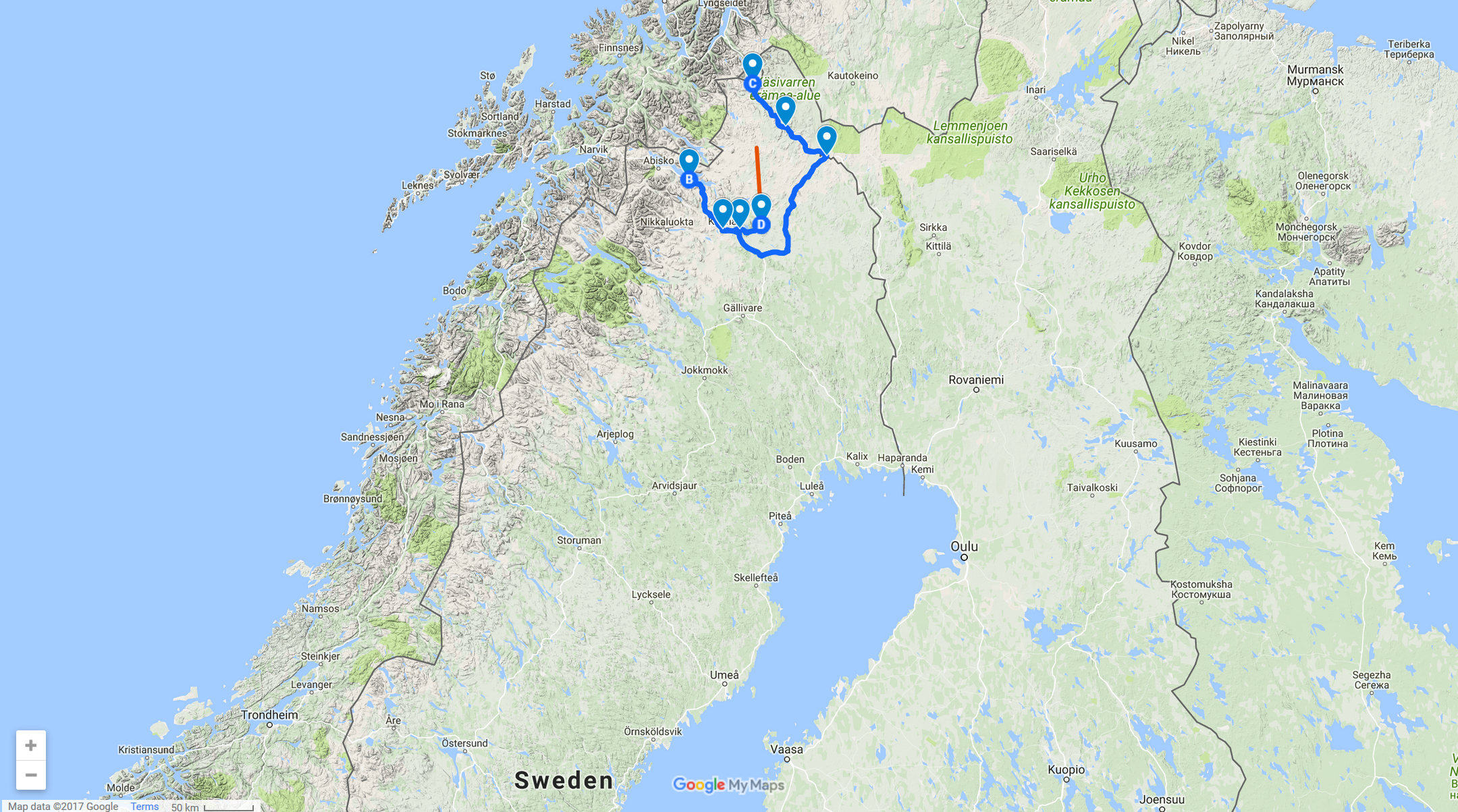
PHASE3: REXUS tracking and finding ROACH (under preparation)
Yes, this it really no joke. We are part of the ROACH experiment onboard a REXUS sounding rocket and sometimes the experiments get lot in the tundra in Northern Sweden (it's pretty north, they have aurora borealis lights!!!).
Friends of us from Strathclyde University needed to find their experiment and they found it a year later. For ROACH, roach we want to take care they alway know where their little rover is, so we offered help to track them. This is a lucky coincidence that we can test our system under these circumstances. How awesome is it to shot something to space and drap it back to earth to find it while being so fast, so high and so hot!
Help us tackle this challenge! We want to find out, if our system can do that. This is why all those experiments are so important for us!
This will also be the most expensive part of the experiment. At least 7 station to record the data, because there is only ONE chance to record the launch! We cannot rely on cellphone coverage, but we want to have mobile internet at each station to get the data and housekeeping data faster. And it will be cold weather, -20degC and lower, in March 2018. It will be a great challenge.